
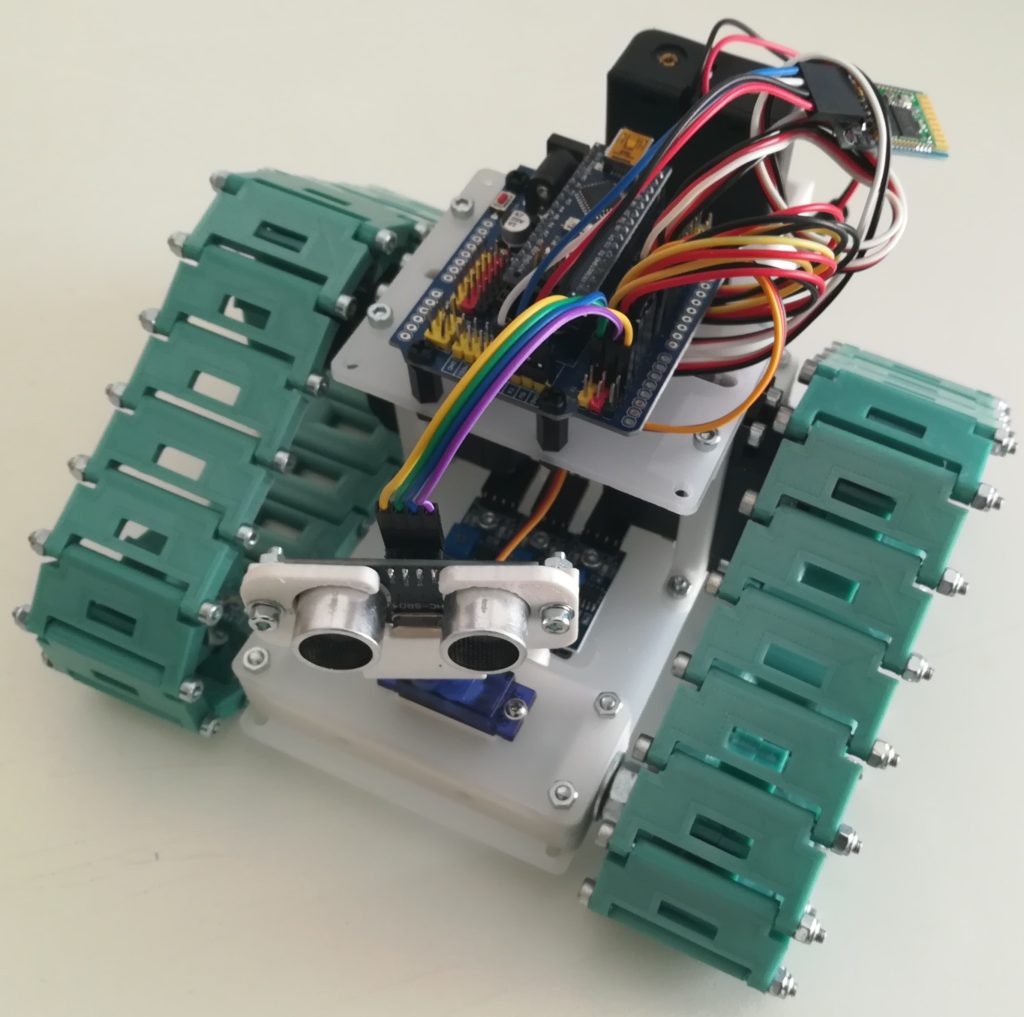
Con questo progetto potrete realizzare il vostro Robot Tank con Arduino, che potrà via via essere accessoriato con sensori ed attuatori.
Iniziamo i lavori….
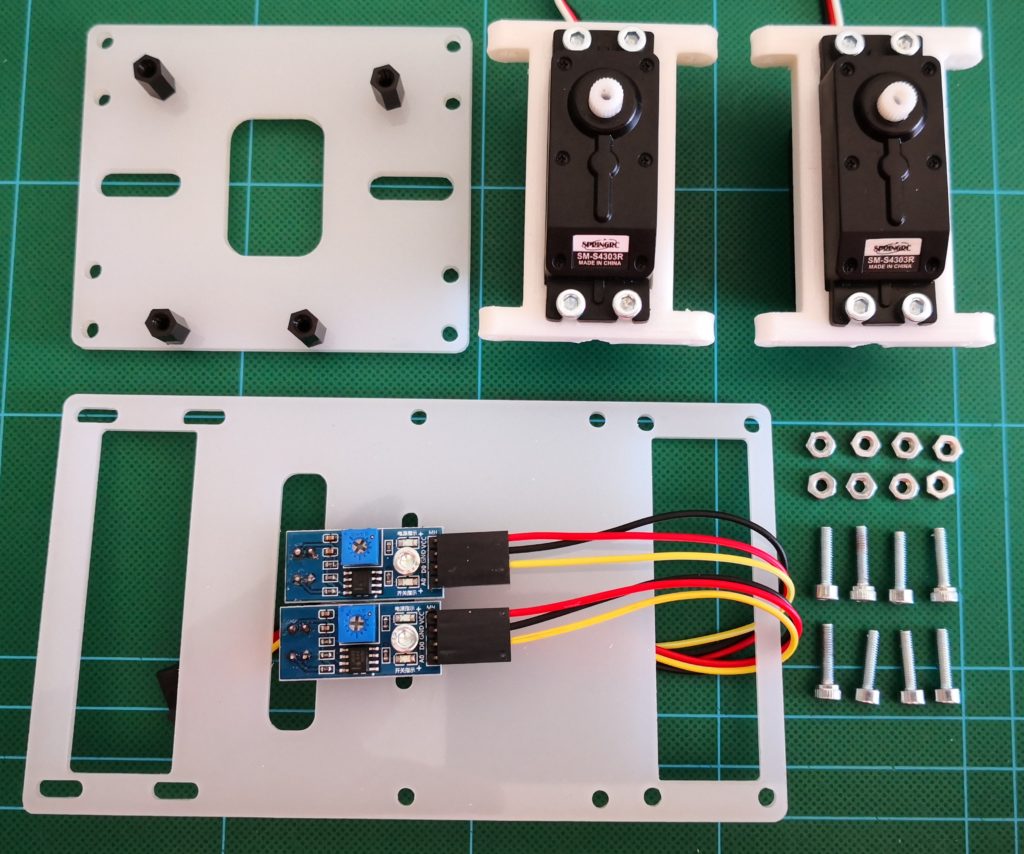
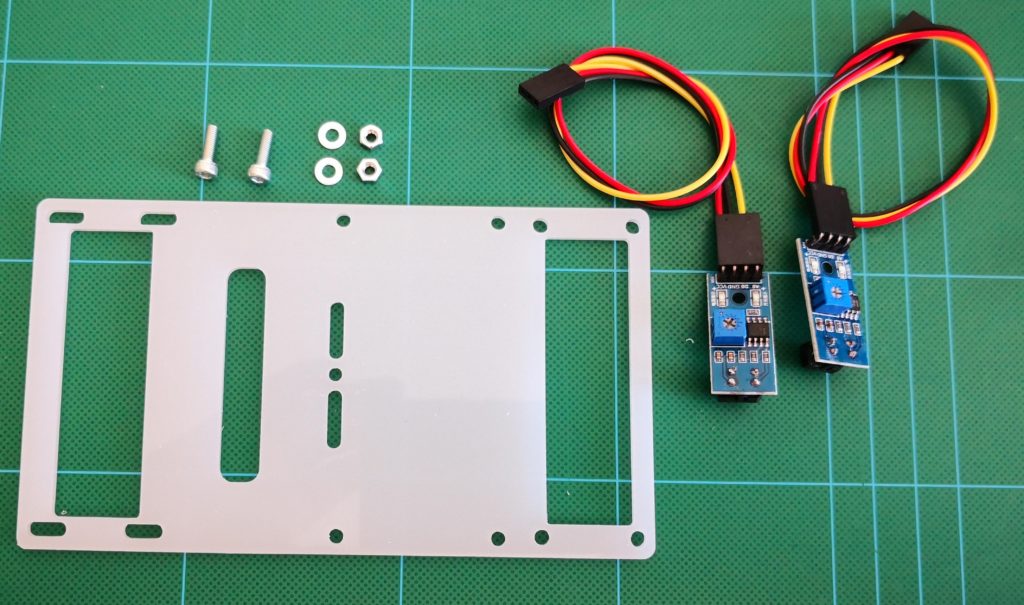 Iniziamo dal telaio e dai sensori di line-follower…
Iniziamo dal telaio e dai sensori di line-follower…
Prendere: 2 Sensori TCRT5000, 2 cavetti di 20 cm, 2 x M3x10, 2 x M3 Rondelle, 2 x M3 Dadi Esagonali: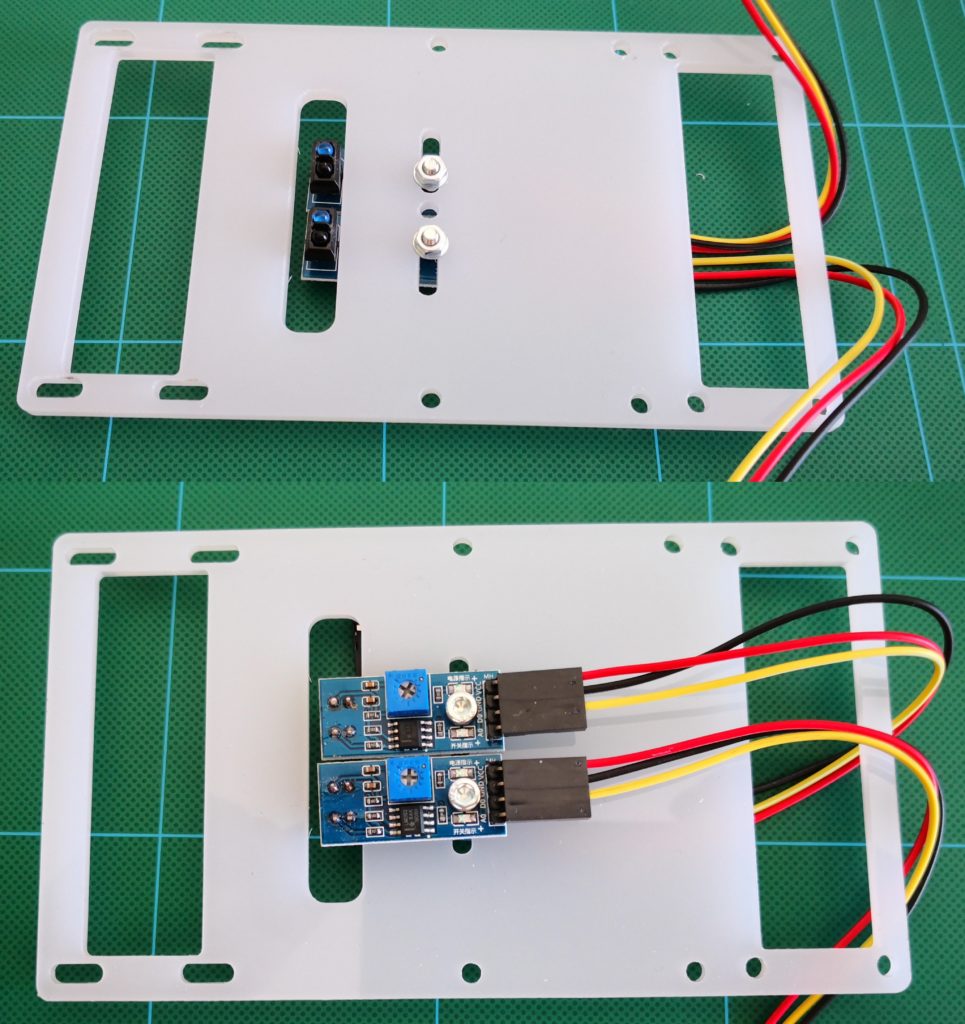
Montiamo il telaio sul quale poi monteremo l’Arduino…
Occorreranno: 4 colonnette M3x10 in Plastica e 4 dadi M3 Esagonali sempre in Plastica: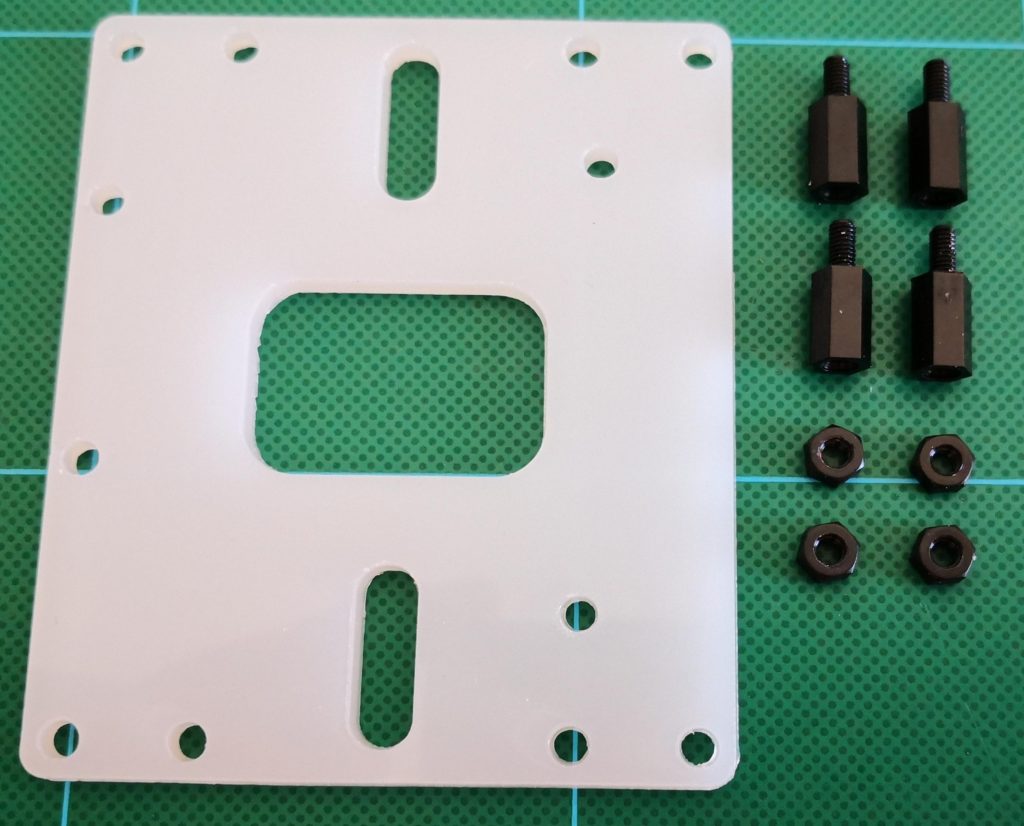 NOTA: Prestare attenzione al posizionamento delle colonnette altrimenti non sarà possibile montare successivamente la scheda.
NOTA: Prestare attenzione al posizionamento delle colonnette altrimenti non sarà possibile montare successivamente la scheda. 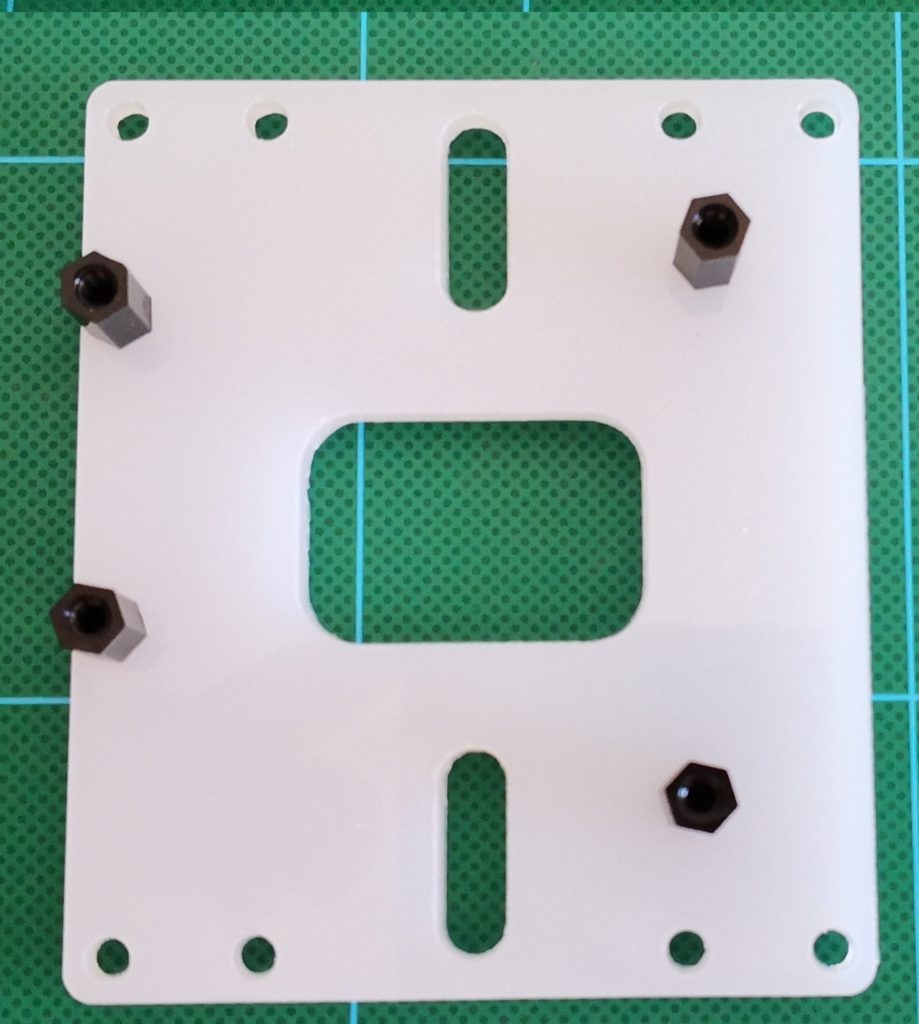 Monteremo ora i motori sui supporti motori…
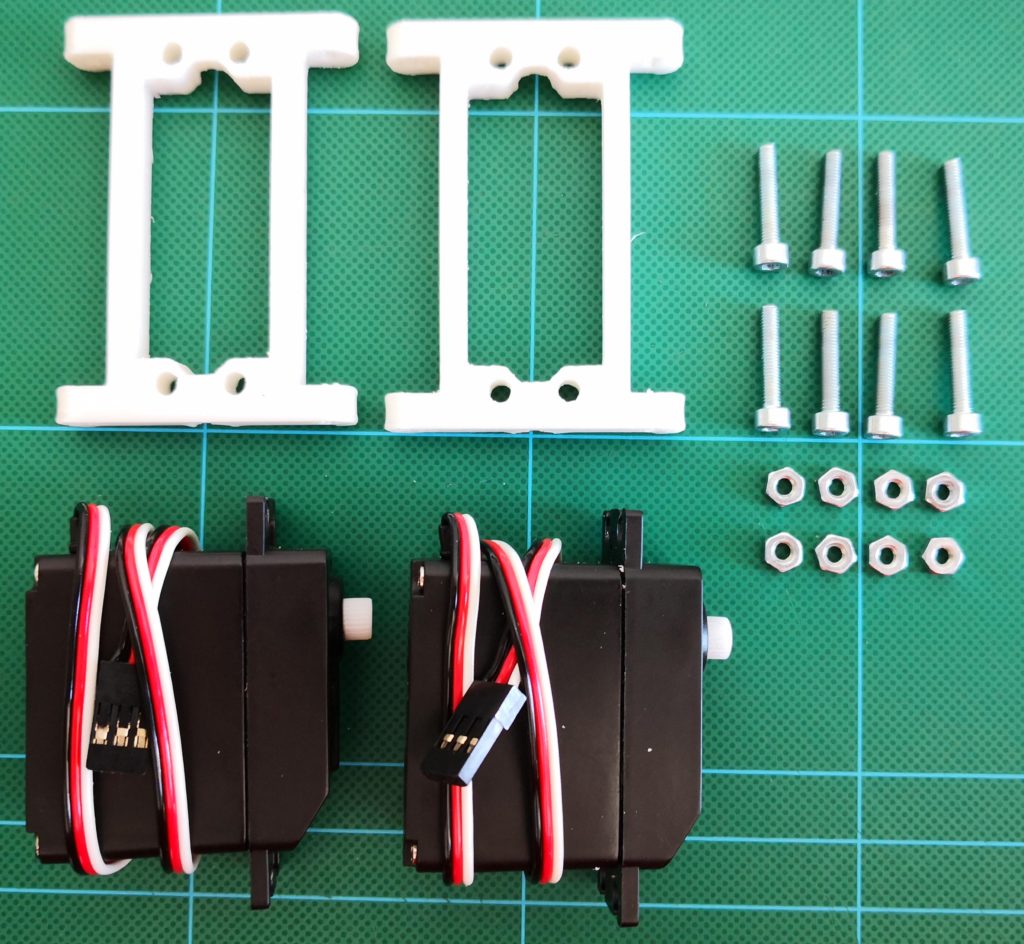
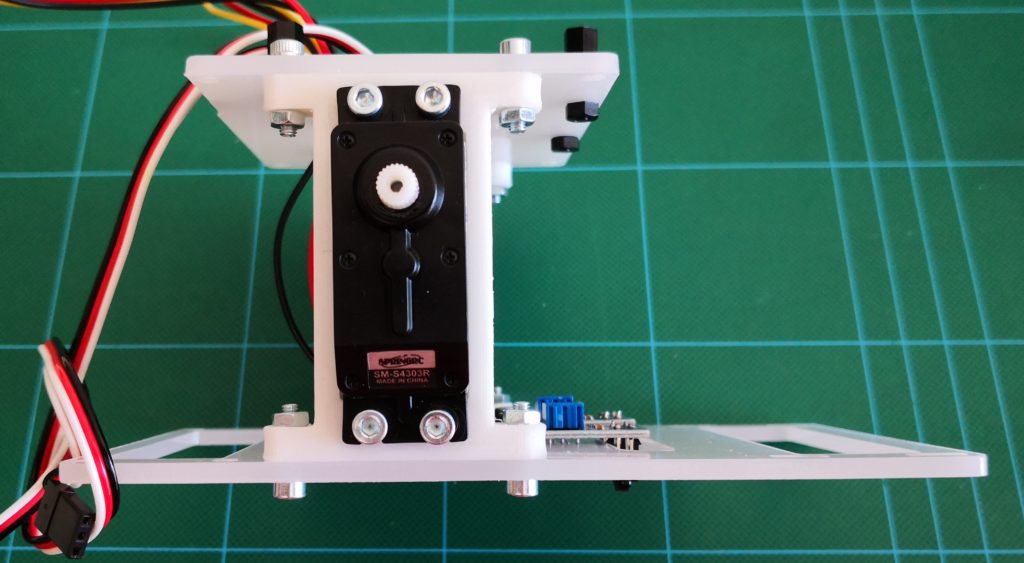
Monteremo ora i motori sui supporti motori…
Prendere i 2 Servo-Motori Continui (mod. SM-S4303R oppure i più veloci AR-3606HB), 2 Supporti Motori, 8 x M3x16, 8 x M3 Dadi Esagonali:
 ATTENZIONE: Far coincidere la scanalatura del supporto motori con la vite di registro del servo.
ATTENZIONE: Far coincidere la scanalatura del supporto motori con la vite di registro del servo.
Nota: Solitamente i Servo-Motori Continui sono tarati per stare fermi con la posizione 90 della libreria Servo di Arduino. Nel caso in cui alla posizione 90 i motori dovessero ruotare si deve agire DELICATAMENTE sul piccolo trimmer presente sul fianco del servo stesso fino ad arrestarli. Il trimmer serve quindi alla taratura della posizione di stop e non alla variazione della velocità!
Qui potrete scaricare lo sketch per testare i motori. 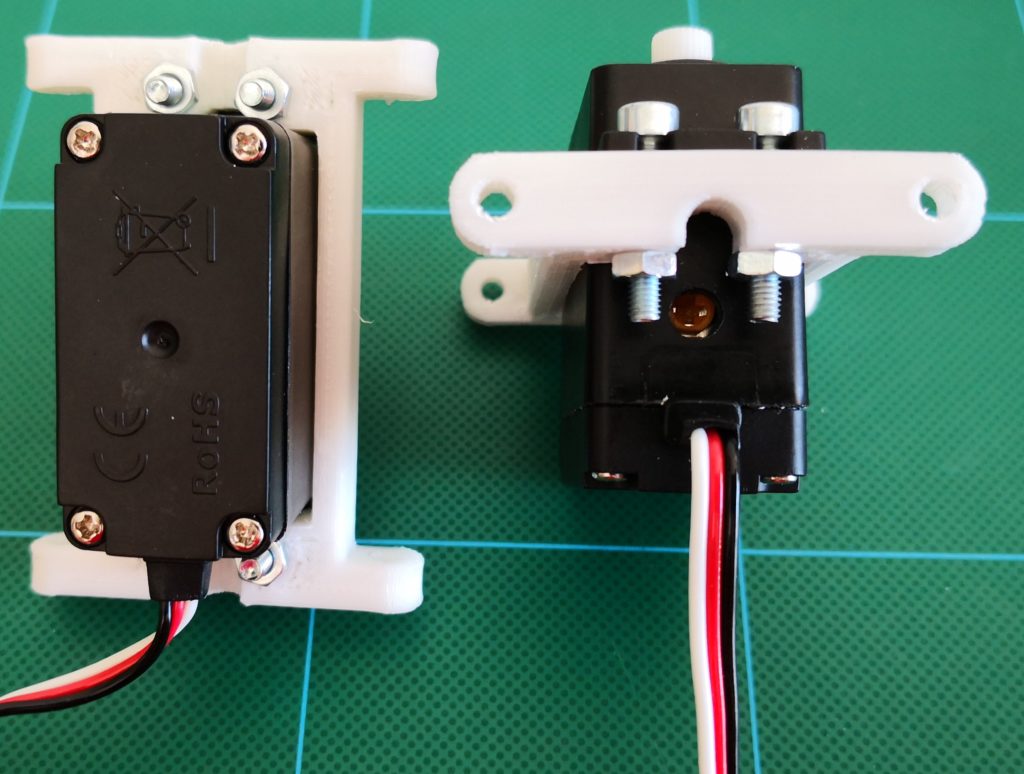 Ora assembleremo insieme i due telai ed i supporti motori…
Ora assembleremo insieme i due telai ed i supporti motori…
Saranno necessari: 8 x M3x12, 8 x M3 Dadi Esagonali:
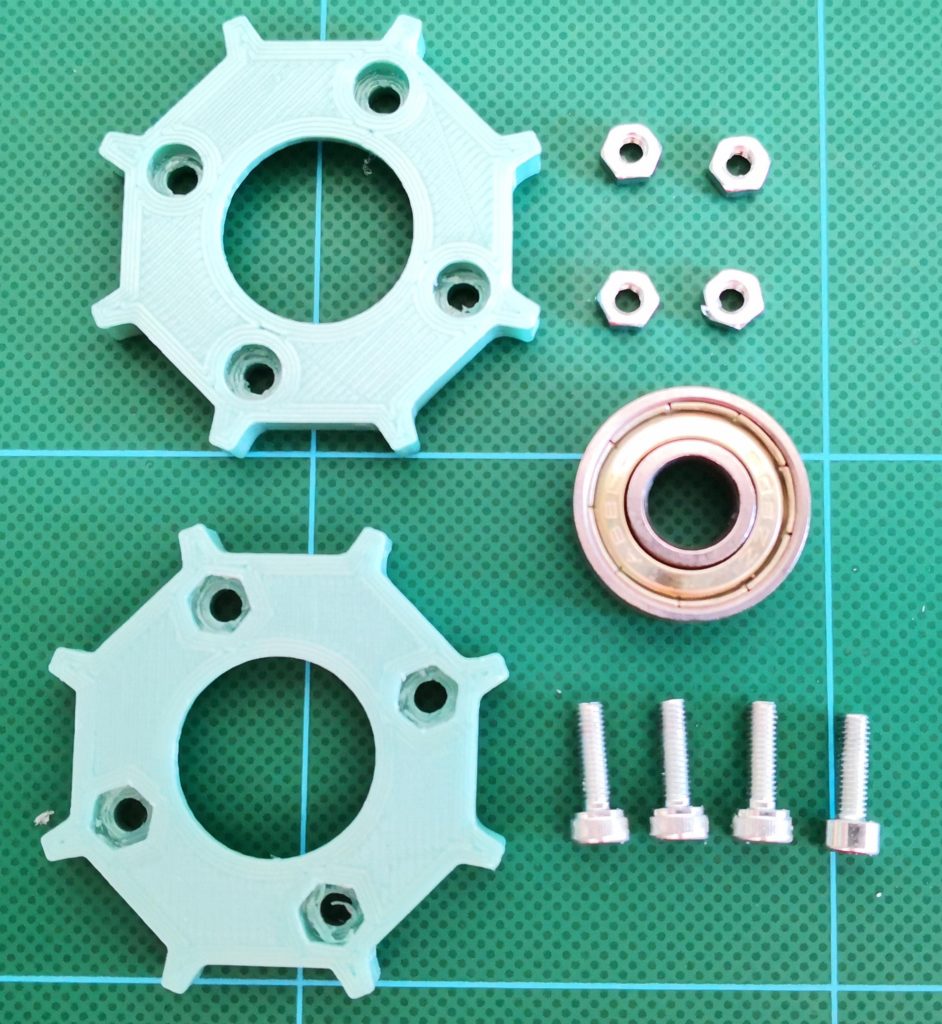
Montaggio ingranaggio ruote folli…
Ne dovremmo assembleare 4! Per ogni ruota folle occorreranno: 2 gusci ingranaggio ruota folle, 4 x M3x10, 4 x M3 Dadi Esagonali, 1 cuscinetto 608ZZ.
 Adesso monteremo gli assi delle ruote folli…
Adesso monteremo gli assi delle ruote folli…
Per ogni ruota folle occorreranno: 1 x M8x45, 3 x M8 Rondelle, 3 x M8 Dadi Esagonali Autobloccanti, 1 supporto ruote folli: NOTA: Nella foto precedente i vari componenti sono in ordine di montaggio.
NOTA: Nella foto precedente i vari componenti sono in ordine di montaggio.
Sotto si vede come deve essere montato ogni asse.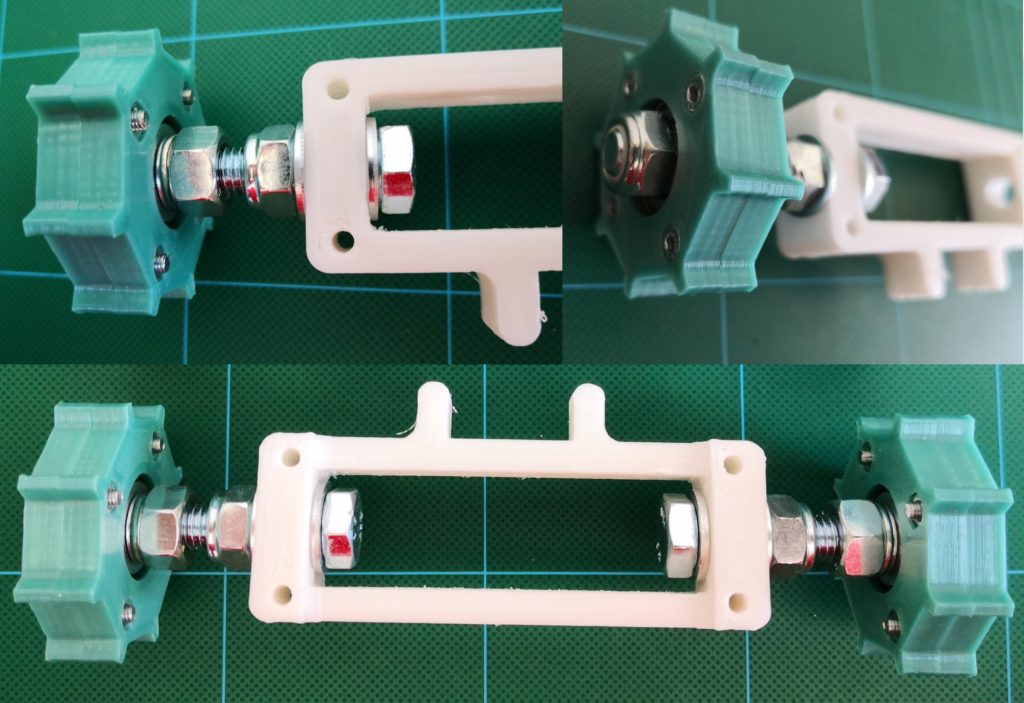 Adesso montiamo gli assi con le ruote folli al telaio…
Adesso montiamo gli assi con le ruote folli al telaio…
Prendere: 2 assi ruote folli assemblati, il telaio con i motori, il supporto Batterie, il telaio supporto mini-servo, 8 x M3x25, 8 x M3 Dadi Esagonali: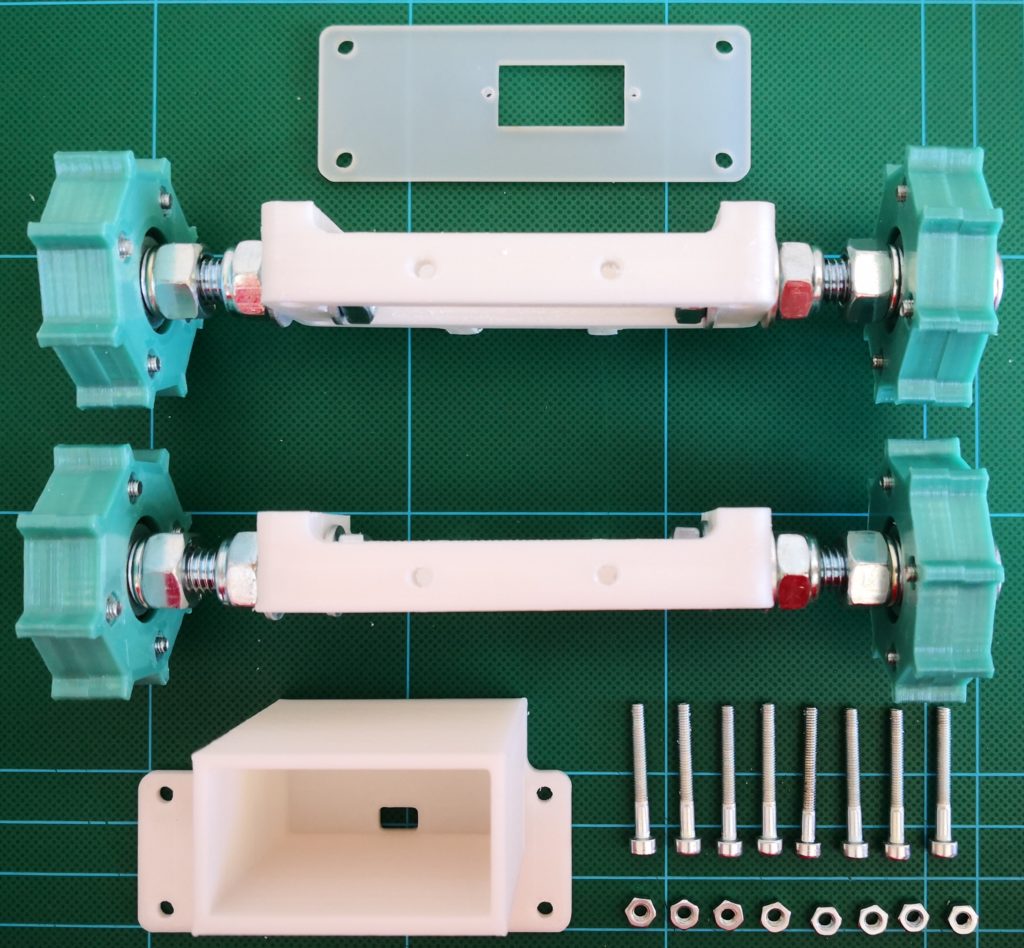 Attenzione: Fare attenzione alla posizione del telaio per il supporto mini-servo poiché non è simmetrico
Attenzione: Fare attenzione alla posizione del telaio per il supporto mini-servo poiché non è simmetrico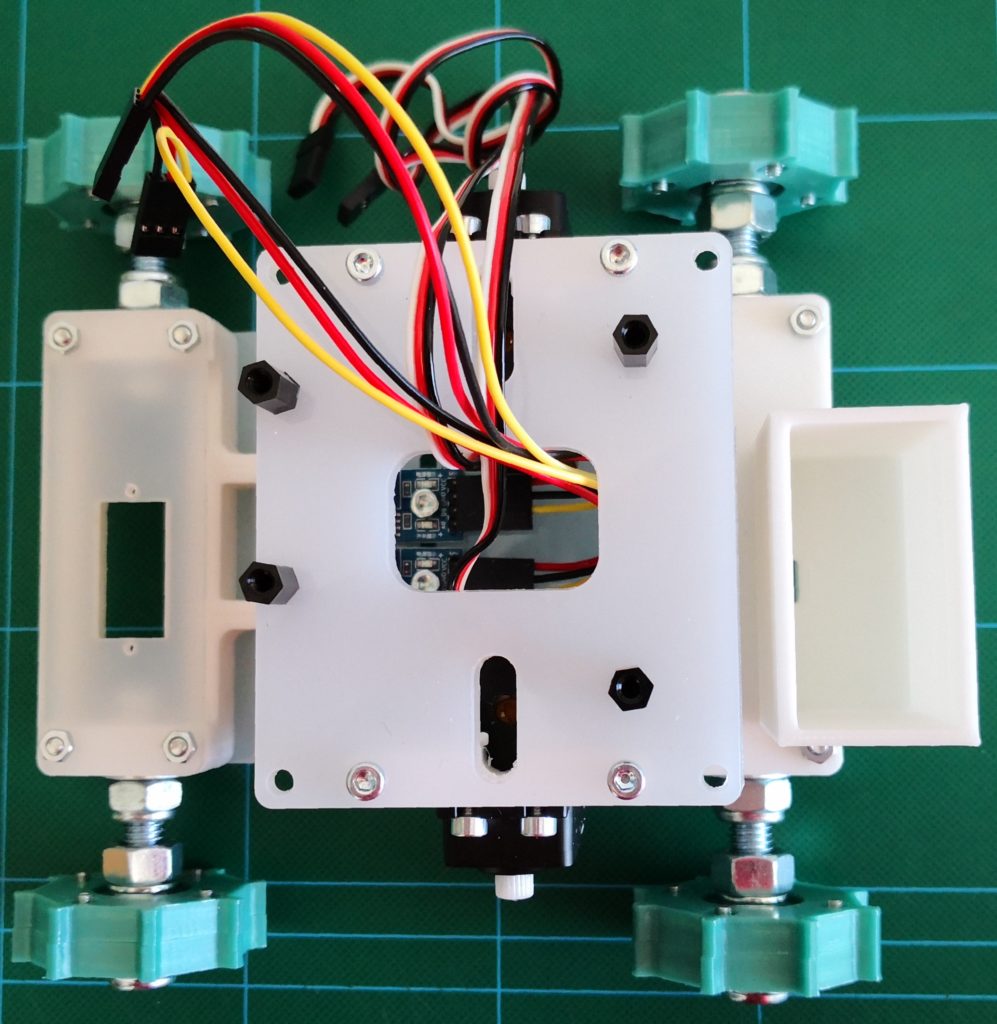 L’asse anteriore dovrà essere montato in battuta verso i motori e le viti non andranno strette troppo, dopo il montaggio dei cingoli ci servirà per regolarne la tensione…!
L’asse anteriore dovrà essere montato in battuta verso i motori e le viti non andranno strette troppo, dopo il montaggio dei cingoli ci servirà per regolarne la tensione…!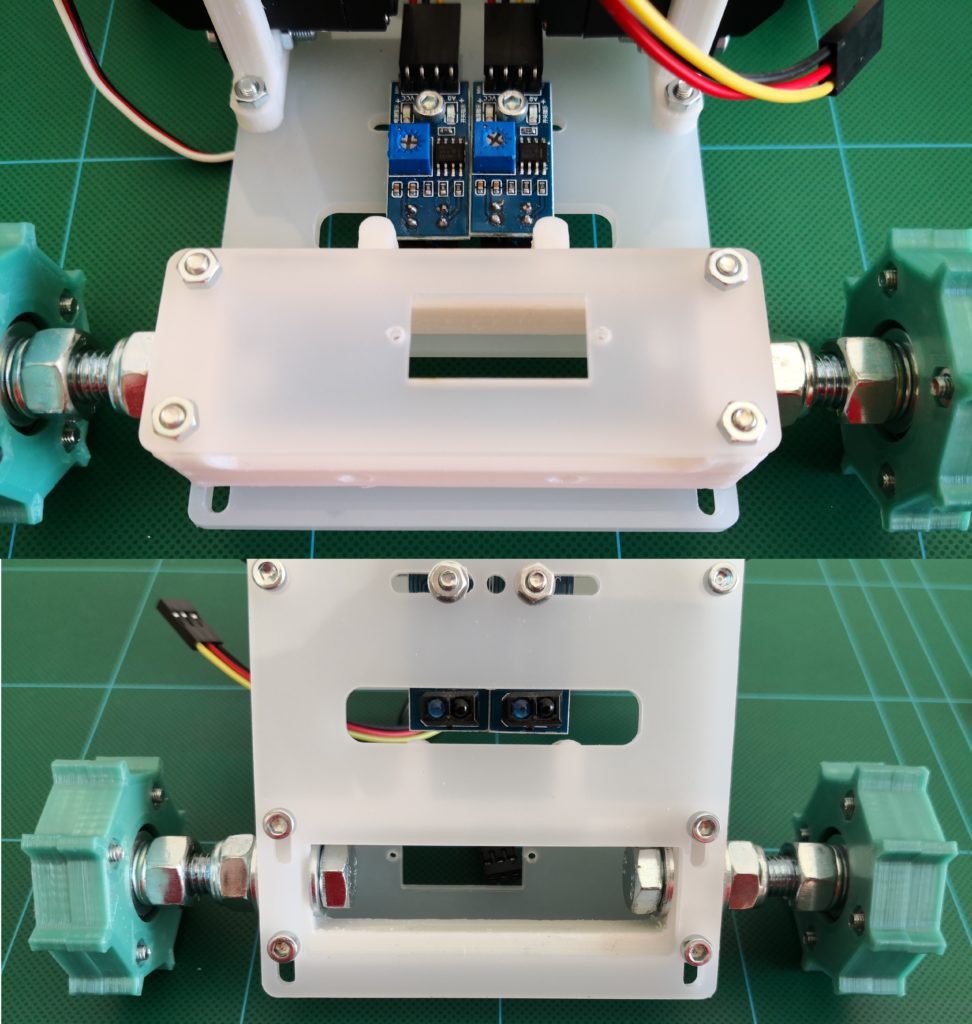 Montiamo il mini-servo…
Montiamo il mini-servo…
Prendere il mini-servo SG90 con le sue due viti di montaggio: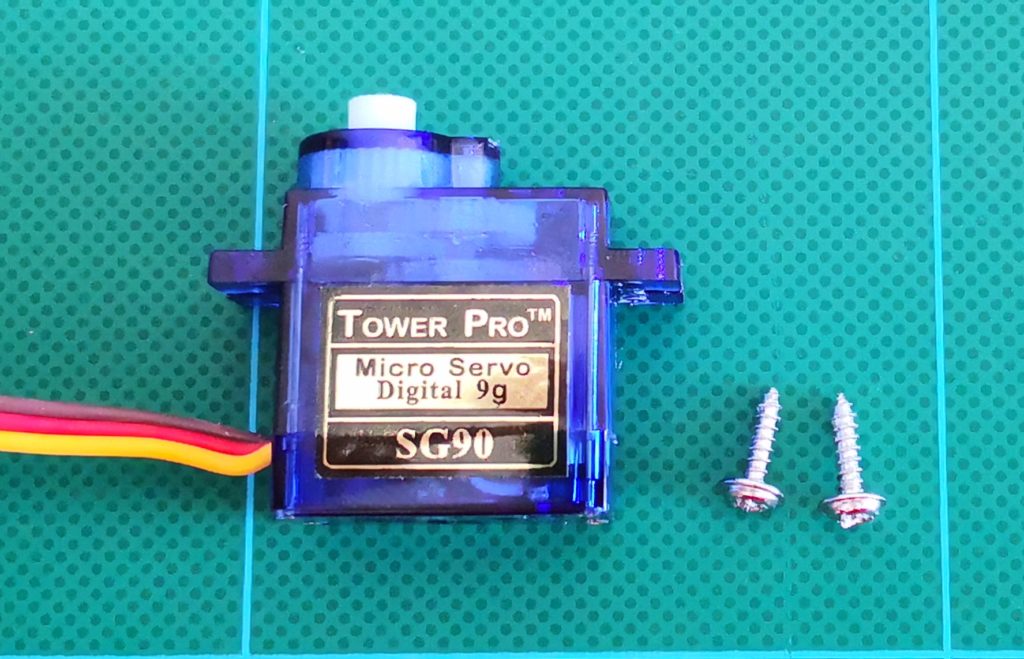 Il cavo del mini-servo deve essere fatto passare nell’intercapedine tra il supporto ruote folli ed il telaio supporto mini-servo.
Il cavo del mini-servo deve essere fatto passare nell’intercapedine tra il supporto ruote folli ed il telaio supporto mini-servo. Montaggio ingranaggi motore…
Montaggio ingranaggi motore…
Prendere: 2 ingranaggi, 2 staffe a 6 punte del servo-motore e 12 viti M2x12:
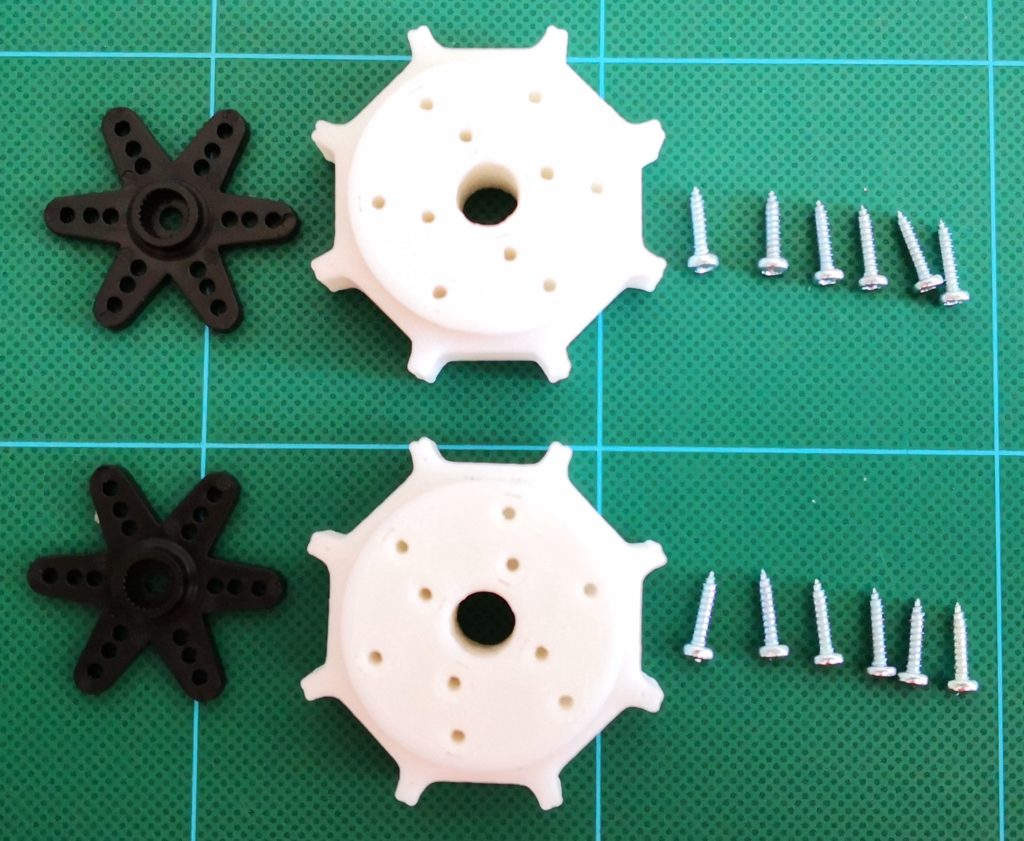 Installazione degli ingranaggi motori sui motori:
Installazione degli ingranaggi motori sui motori:
Prendere: 2 ingranaggi pre-assemblati, 2 viti dei servo-motori: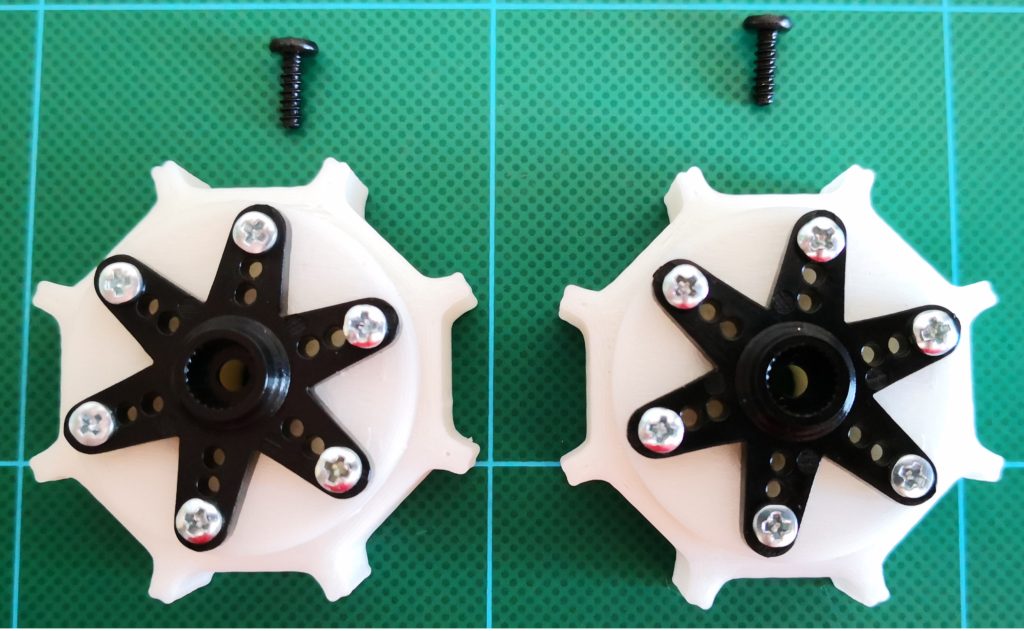
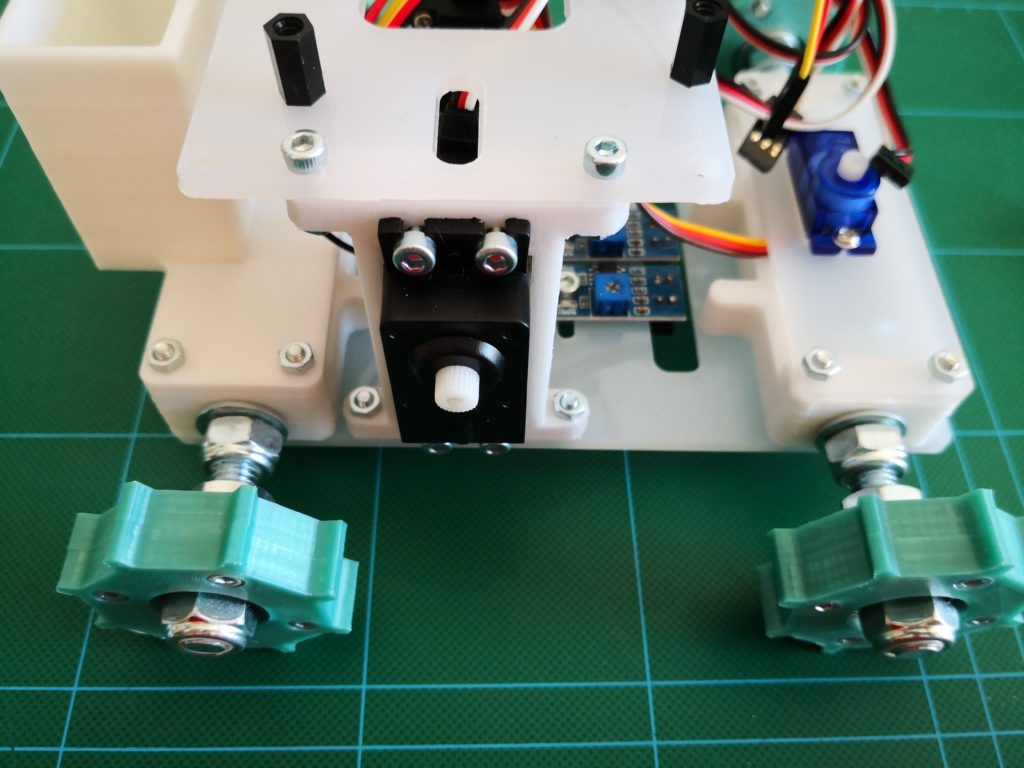 ATTENZIONE: Verificare che gli ingranaggi folli siano allineati a quello motore agendo sui dadi autobloccanti.
ATTENZIONE: Verificare che gli ingranaggi folli siano allineati a quello motore agendo sui dadi autobloccanti. 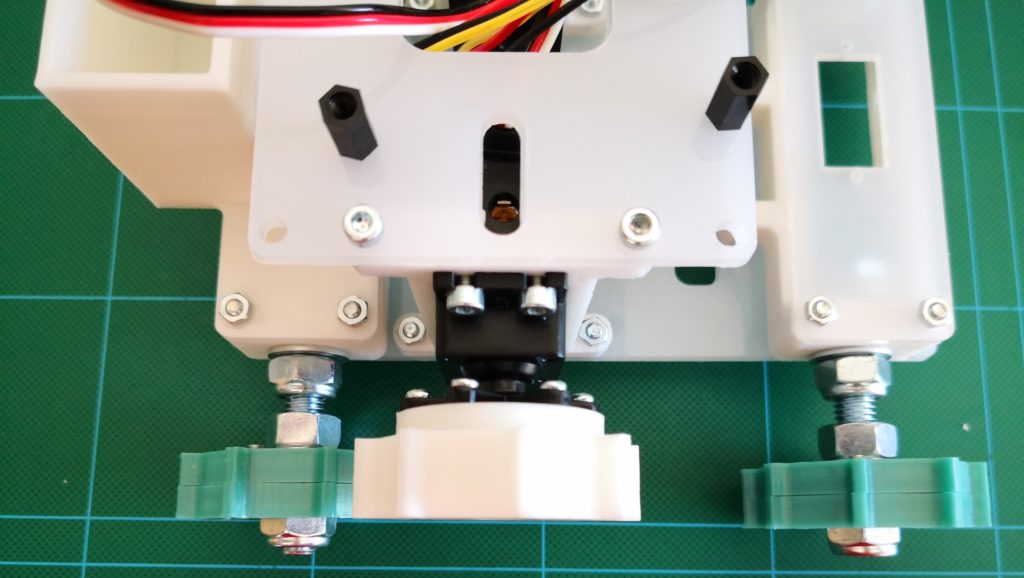 Assemblaggio cingoli…
Assemblaggio cingoli…
Per ogni cingolo occorreranno: 21 x M3x45, 21 M3 Dadi Esagonali Autobloccanti, 21 x Maglie Cingolo.
ATTENZIONE: Non serrare troppo i dadi, le singole maglie devono muoversi liberamente ed i due cingoli dovranno essere montati speculari, come nella foto sotto,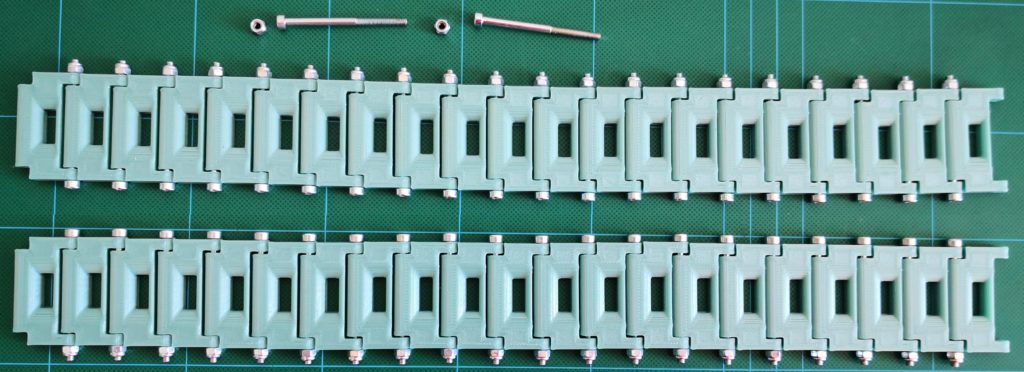 Montare i cingoli sul Robot e regolare la tensione tramite l’asse anteriore.
Montare i cingoli sul Robot e regolare la tensione tramite l’asse anteriore.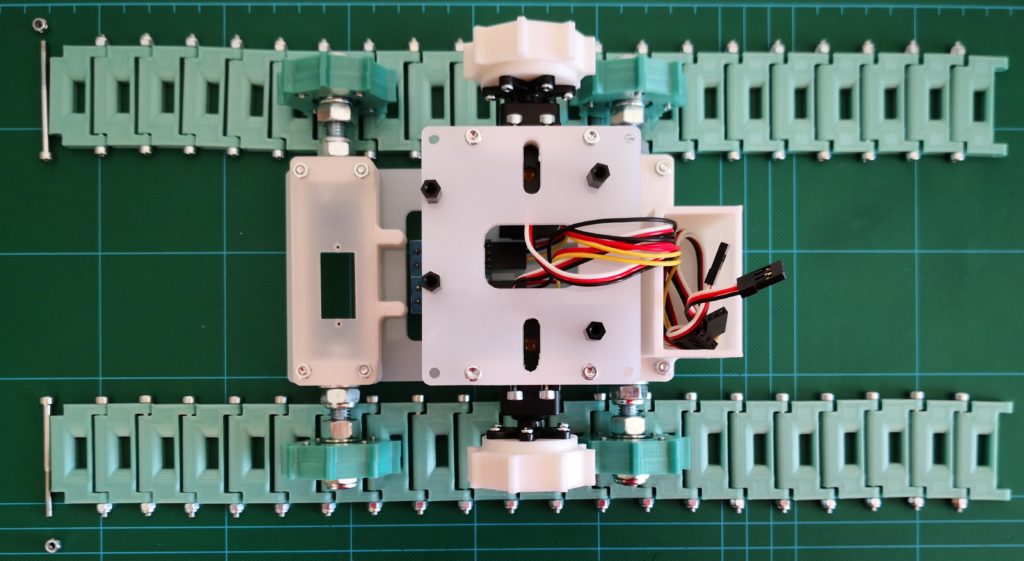
Per poter evitare gli ostacoli si utilizzano i moduli ad ultrasuoni HC-SR04.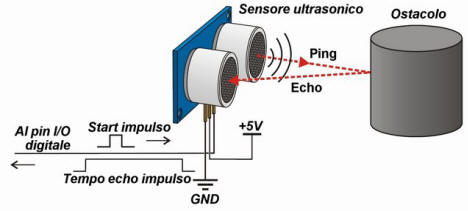
Qui potrete scaricare lo sketch per testare il modulo ultrasuoni HC-SR04 (verificate i pin richiamati nello sketch prima di caricarlo nella scheda).
Occorreranno: 1 modulo HC-SR04, 1 cavetto da 10 cm, 1 x supporto ultrasuoni, 1 x blocco ultrasuoni, 2 x M3x14, 4 x M3 Rondelle, 2 x M3 Dadi Esagonali, 2 viti M2x8, 1 staffa a due braccia del mini-servo, 1 vite di fissaggio staffa del Mini-servo:
 Montare il tutto come da foto sotto…
Montare il tutto come da foto sotto… 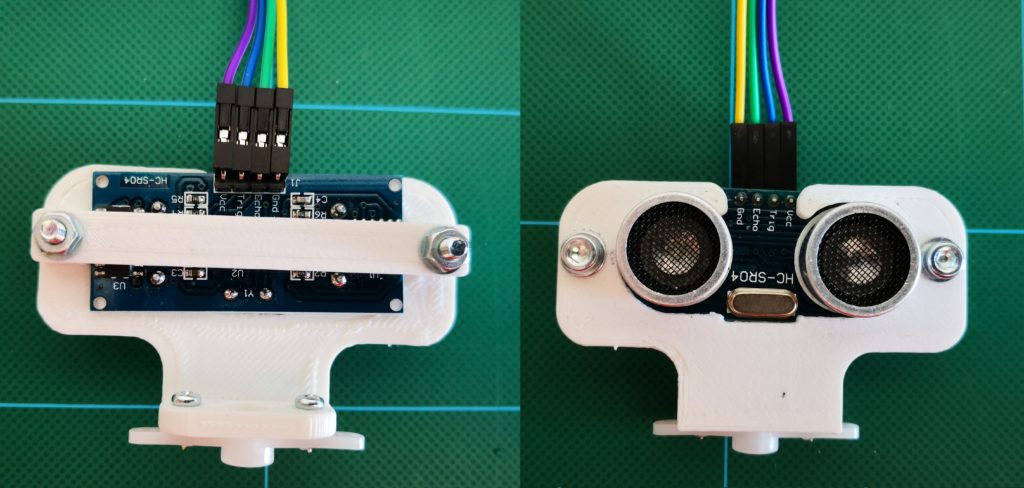 Manca poco…
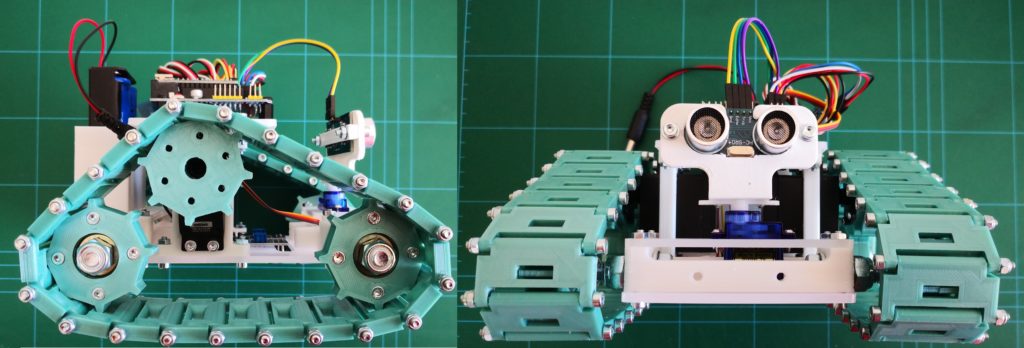
Manca poco…
Eccome come risulta il nostro robot dopo aver fissato il sonar: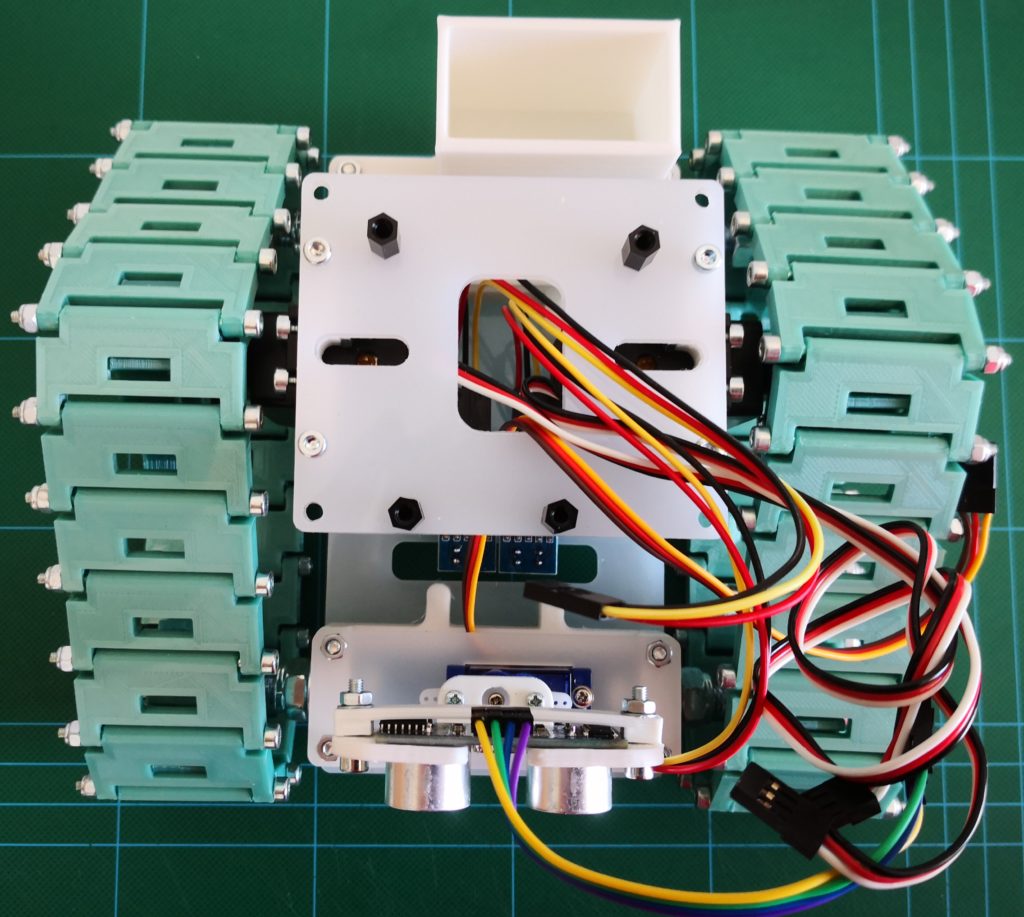 Ed adesso sotto con le connessioni…..
Ed adesso sotto con le connessioni…..
Per questo robot abbiamo utilizzato un Arduino Nano con la shild di espansione, che ci permetterà di collegare tutto senza problemi.
Occorreranno: 4 x M3x8 Viti in Plastica:
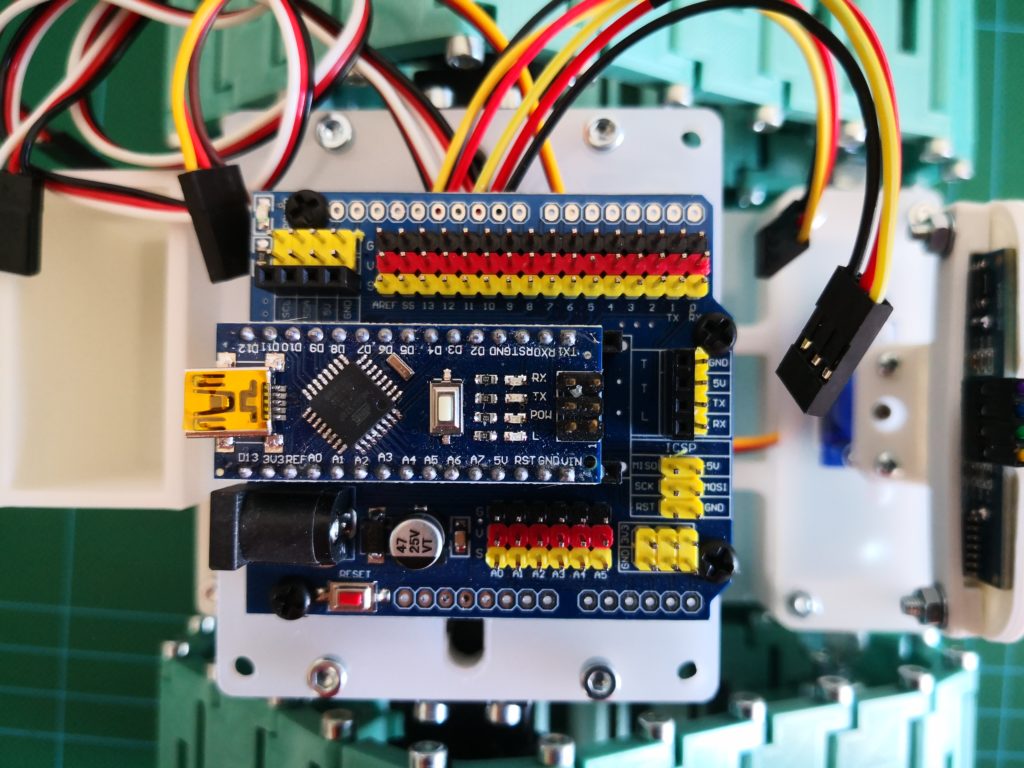 Colleghiamo i componenti alla scheda…
Colleghiamo i componenti alla scheda…
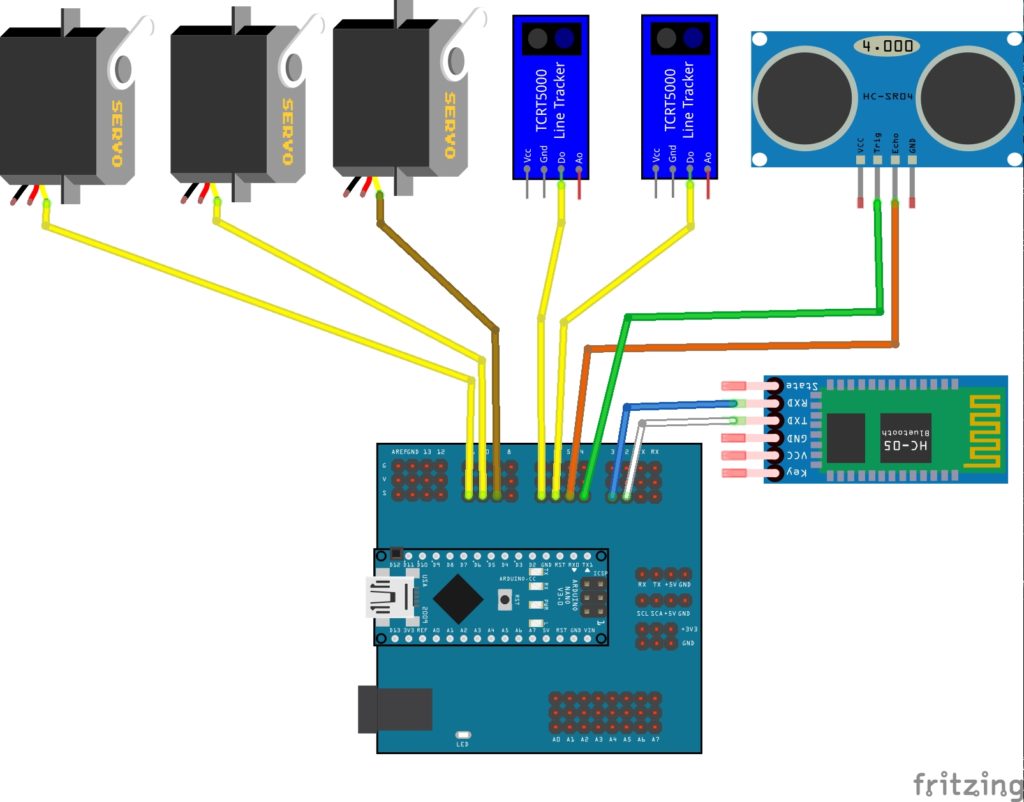
Le connessioni possono essere fatte seguendo il seguente schema.
NOTA: Per semplificare lo schema non sono state riportate le connessioni a VCC e a GND dei vari componenti.
Finito…!
Ecco il nostro robot Tank dopo aver installato anche il modulo Bluetooth 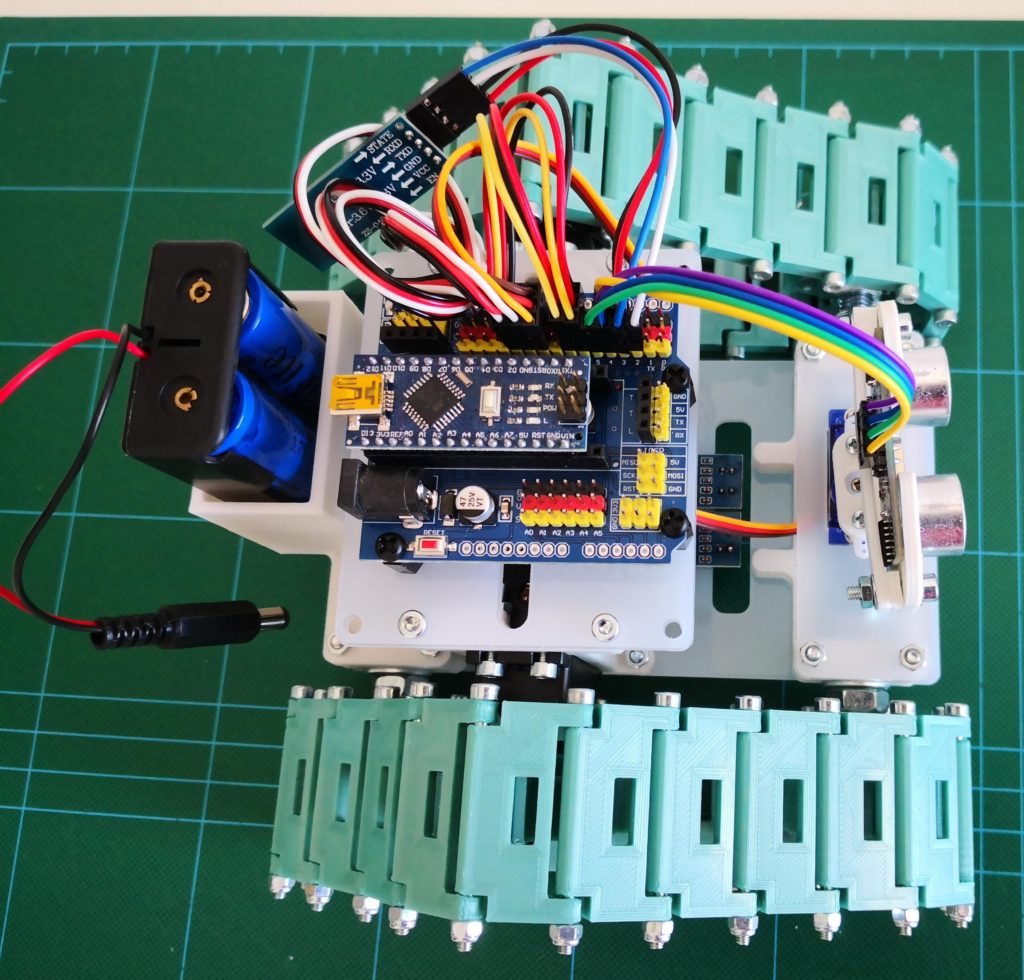
 Come APP per Android vi consigliamo di usare la nostra “Makerslab 1 Robot Control” scaricabile da qui
Come APP per Android vi consigliamo di usare la nostra “Makerslab 1 Robot Control” scaricabile da qui
 Uno Sketch di esempio da usare è il seguente:
Uno Sketch di esempio da usare è il seguente:
// Firmware per robottino cingolato Nano // Ultimo aggioramento 19/07/20 /****************************************************************** Librerie ******************************************************************/ #include <SoftwareSerial.h> #include <Servo.h> /****************************************************************** Definizione dei pin e delle variabili ******************************************************************/ /* Definizione dei PIN usati sulla scheda */ #define SF_RX_PIN 2 /* RX scheda arduinio da collegare al TX Bluetooth */ #define SF_TX_PIN 3 /* TX scheda arduinio da collegare al RX Bluetooth */ #define trigPin 4 /* Pin Trig sensore ultrasuoni */ #define echoPin 5 /* Pin Echo sensore ultrasuoni */ #define sensIRDx 6 /* Ir Destro */ #define sensIRSx 7 /* Ir Sinistro */ #define pinminiservo 9 /* Miniservo Utrasuoni */ #define pinruotaSinistra 10 /* Sinistra servo Ruota */ #define pinruotaDestra 11 /* Destra servo Ruota */ /* Definitione dei valori dei valori che possono assumere servo a rotazione continua, cioè le ruote */ #define ruotaStopValore 90 #define ruotaSinistraAvantiValore 0 // 180 per i servo AR-3606HB, 0 per i servo SM-S4303R #define ruotaSinistraIndietroValore 180 // 0 per i servo AR-3606HB, 180 per i servo SM-S4303R #define ruotaDestraAvantiValore 180 // 0 per i servo AR-3606HB, 180 per i servo SM-S4303R #define ruotaDestraIndietroValore 0 // 180 per i servo AR-3606HB, 0 per i servo SM-S4303R #define defaultDelay 10 SoftwareSerial bt = SoftwareSerial(SF_RX_PIN, SF_TX_PIN); int ritardo = 10; // dichiaro la variabile Ritardo e preassegno un valore int statodestroIR; // dichiaro la variabile per salvare lo stato della lettura del sensore Ir Destro int statosinistroIR; // dichiaro la variabile per salvare lo stato della lettura del sensore Ir Sinistro int NERO = 1; // 1 con sensori Ir TCRT5000 int BIANCO = 0; // 0 con sensori Ir TCRT5000 /* Creazione oggetti per la libreria Servo */ Servo servoRadar; /* Valores from 0 to 180 */ Servo ruotaSinistra; /* Valores from 0 to 180 */ Servo ruotaDestra; /* Valores from 0 to 180 */ char dataBuffer; int i = 0; int numChar = 0; long duration; int cm; #define MANUAL_CONTROL 0 #define LINE_FOLLOWER 1 #define LIGHT_FOLLOWER 2 #define EVITA_OSTACOLI 3 int currentState; /****************************************************************** Definizione delle funzioni ******************************************************************/ void stopRuote() { ruotaSinistra.write(ruotaStopValore); delay(defaultDelay); ruotaDestra.write(ruotaStopValore); delay(defaultDelay); } void vaiAvanti() { ruotaSinistra.write(ruotaSinistraAvantiValore); delay(defaultDelay); ruotaDestra.write(ruotaDestraAvantiValore); delay(defaultDelay); } void vaiIndietro() { ruotaSinistra.write(ruotaSinistraIndietroValore); delay(defaultDelay); ruotaDestra.write(ruotaDestraIndietroValore); delay(defaultDelay); } void vaiAvantiSinistra() { ruotaSinistra.write(ruotaStopValore); delay(defaultDelay); ruotaDestra.write(ruotaDestraAvantiValore); delay(defaultDelay); } void vaiAvantiDestra() { ruotaSinistra.write(ruotaSinistraAvantiValore); delay(defaultDelay); ruotaDestra.write(ruotaStopValore); delay(defaultDelay); } void vaiIndietroSinistra() { ruotaSinistra.write(ruotaStopValore); delay(defaultDelay); ruotaDestra.write(ruotaDestraIndietroValore); delay(defaultDelay); } void vaiIndietroDestra() { ruotaSinistra.write(ruotaSinistraIndietroValore); delay(defaultDelay); ruotaDestra.write(ruotaStopValore); delay(defaultDelay); } void vaiRuotaSinistra() { ruotaSinistra.write(ruotaSinistraIndietroValore); delay(defaultDelay); ruotaDestra.write(ruotaDestraAvantiValore); delay(defaultDelay); } void vaiRuotaDestra() { ruotaSinistra.write(ruotaSinistraAvantiValore); delay(defaultDelay); ruotaDestra.write(ruotaDestraIndietroValore); delay(defaultDelay); } void lineFollower() { statosinistroIR = digitalRead(sensIRDx); statodestroIR = digitalRead(sensIRSx); if (statosinistroIR == NERO && statodestroIR == NERO) { vaiAvanti(); } if (statosinistroIR == BIANCO && statodestroIR == NERO) { vaiAvantiDestra(); } if (statosinistroIR == NERO && statodestroIR == BIANCO) { vaiAvantiSinistra(); } if (statosinistroIR == BIANCO && statodestroIR == BIANCO) { stopRuote(); } } void evitaOstacoli() { ultrasuoni(); delay(100); if (cm < 18 ) { vaiIndietro(); delay(100); } if (cm > 19 && cm < 30) { vaiRuotaDestra(); delay(500); } if (cm > 31) { vaiAvanti(); delay(100); } } void ultrasuoni() { digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); cm = microsecondsToCentimeters(duration); } long microsecondsToCentimeters(long microseconds) { return microseconds / 29 / 2; } void setup() { pinMode(SF_RX_PIN, INPUT); pinMode(SF_TX_PIN, OUTPUT); pinMode(sensIRSx, INPUT); pinMode(sensIRDx, INPUT); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); bt.begin(9600); bt.flush(); servoRadar.attach(pinminiservo); ruotaSinistra.attach(pinruotaSinistra); ruotaDestra.attach(pinruotaDestra); } void loop() { if (bt.available() > 0) { dataBuffer = bt.read(); delay(3); } switch (dataBuffer) { case 'M': currentState = MANUAL_CONTROL; stopRuote(); break; case 'I': currentState = LINE_FOLLOWER; break; case 'G': currentState = LIGHT_FOLLOWER; break; case 'B': currentState = EVITA_OSTACOLI; break; case 'A': vaiAvantiSinistra(); break; case 'U': vaiAvanti(); break; case 'F': vaiAvantiDestra(); break; case 'L': vaiRuotaSinistra(); break; case 'R': vaiRuotaDestra(); break; case 'C': vaiIndietroSinistra(); break; case 'D': vaiIndietro(); break; case 'E': vaiIndietroDestra(); break; } bt.flush(); if (currentState == LINE_FOLLOWER) { lineFollower(); } else if (currentState == LIGHT_FOLLOWER) { //avoidTheLight(); } else if (currentState == EVITA_OSTACOLI) { evitaOstacoli(); } }
NOTE: Questo progetto trae spunto dai seguenti progetti:
https://www.thingiverse.com/thing:14599
https://www.thingiverse.com/thing:284242