
Robot 2wd rover con Arduino
Con questo progetto potrete realizzare un rover 2WD con Arduino che potrà essere integrato via via con sensori e funzioni.
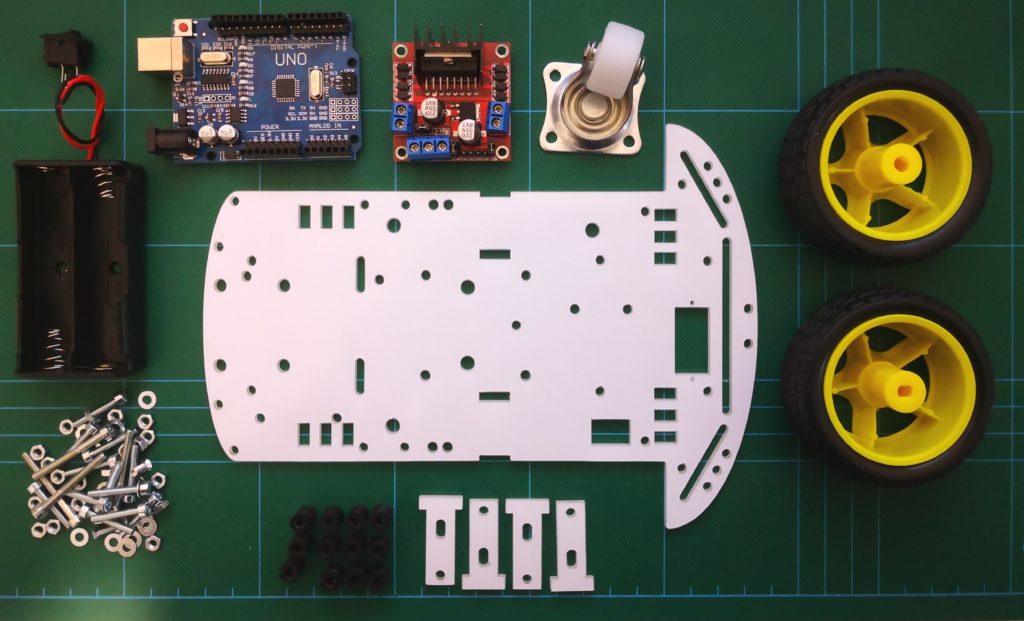
 Iniziamo i lavori….
Iniziamo i lavori….
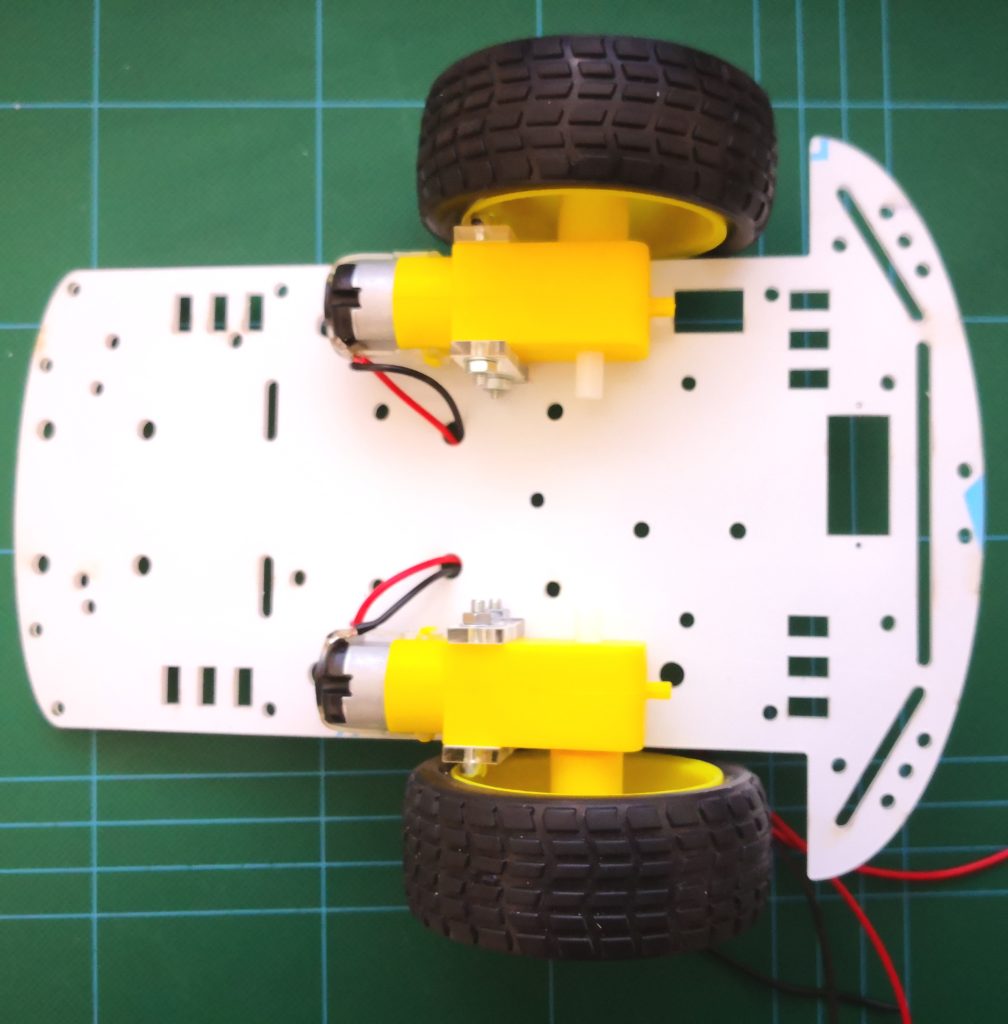
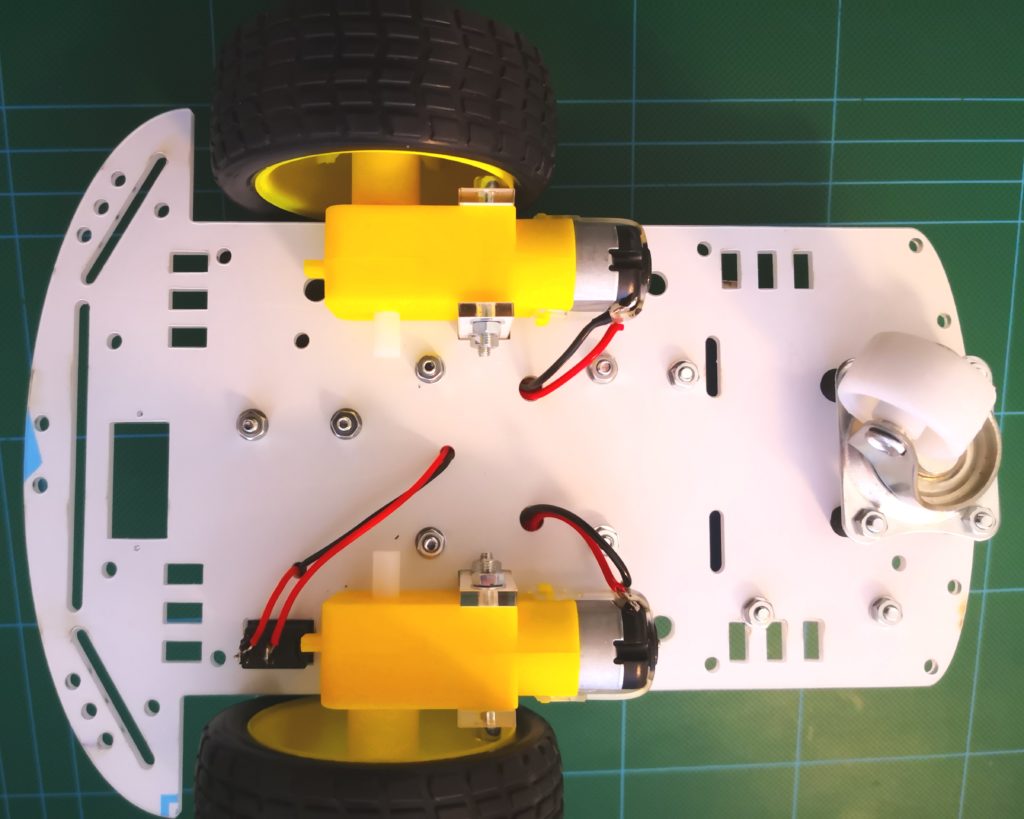
 Si parte dalle ruote,….
Si parte dalle ruote,….
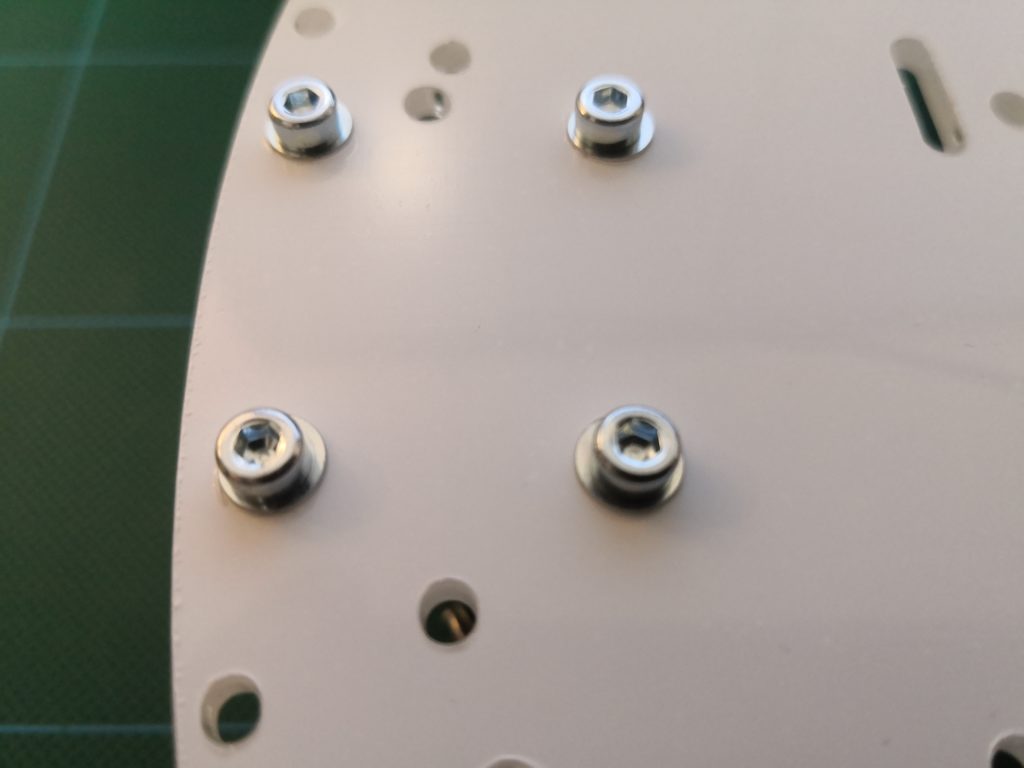
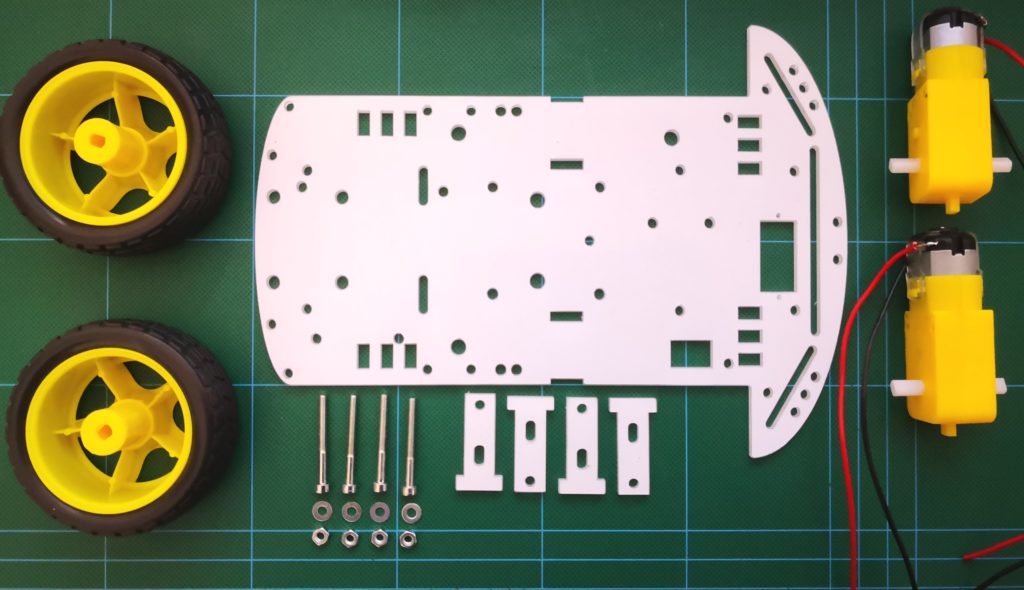 Occorreranno: 4 viti M3x30, 4 dadi e 4 rondelle.
Occorreranno: 4 viti M3x30, 4 dadi e 4 rondelle.
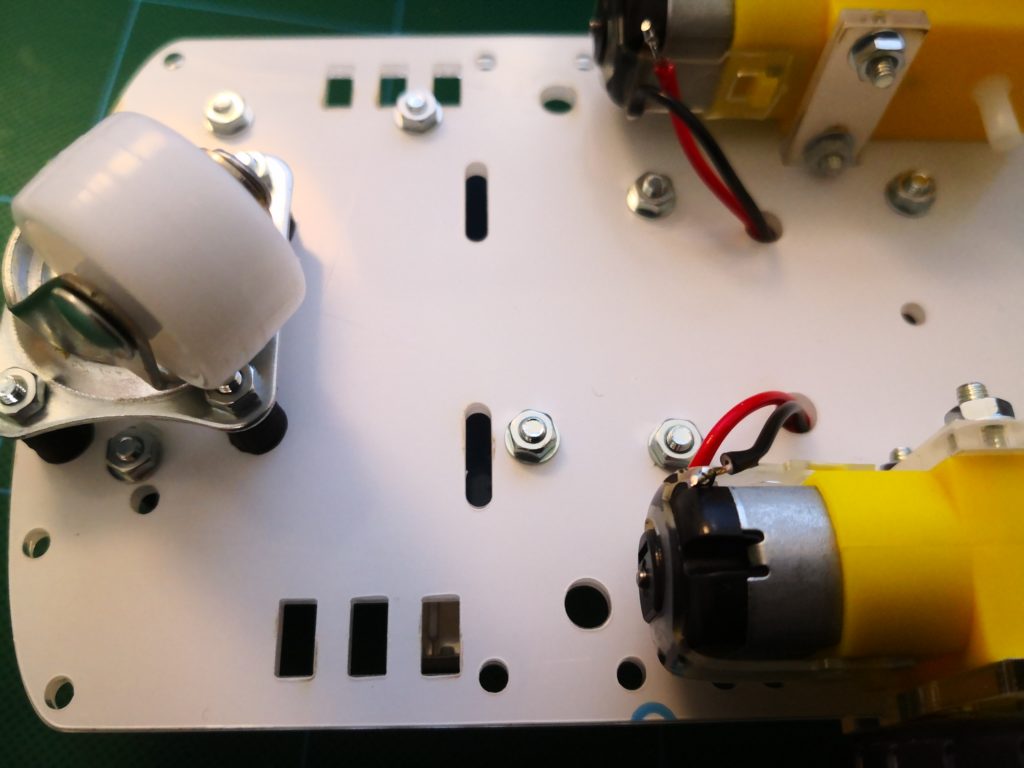
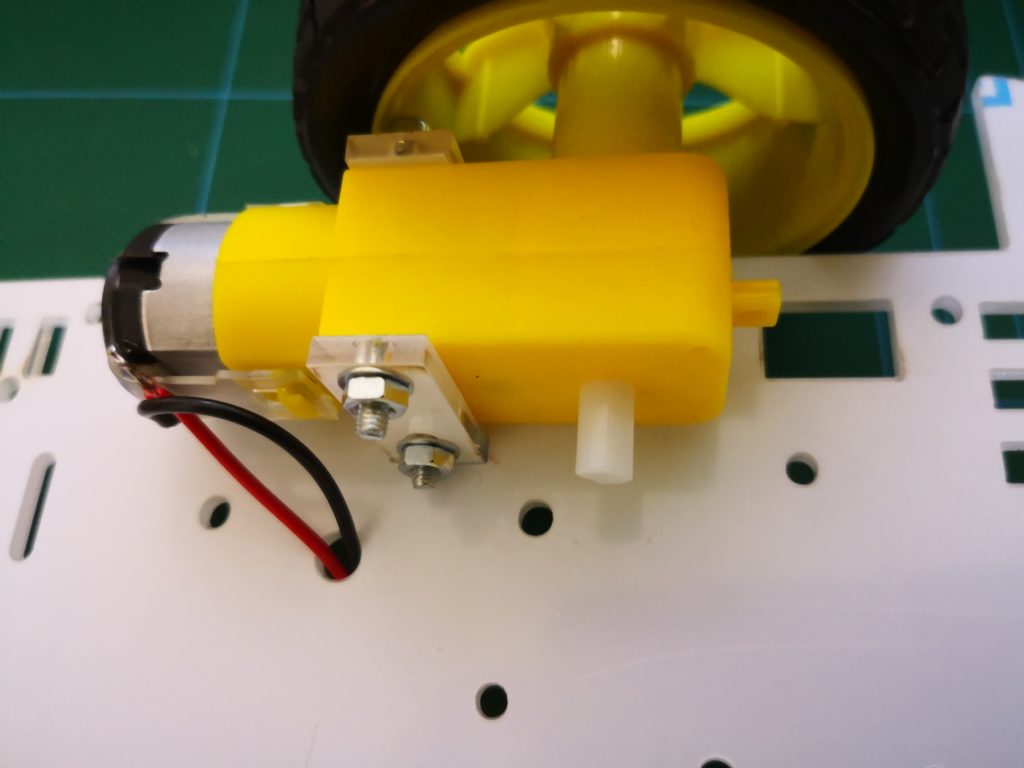 Si faranno passare i cavi dei motori.
Si faranno passare i cavi dei motori.
 Montaggio ruota piroettante.
Montaggio ruota piroettante.
 Occorreranno: 4 viti M3x16, 4 dadi, 4 rondelle e 4 spessori di 10 mm.
Occorreranno: 4 viti M3x16, 4 dadi, 4 rondelle e 4 spessori di 10 mm.

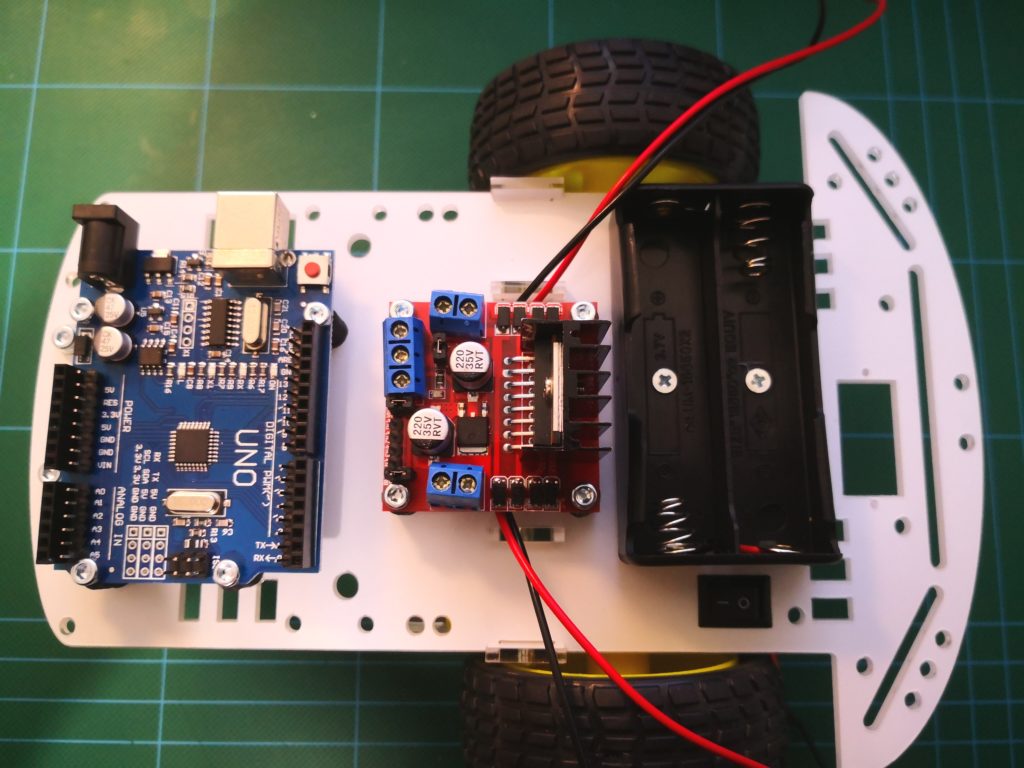
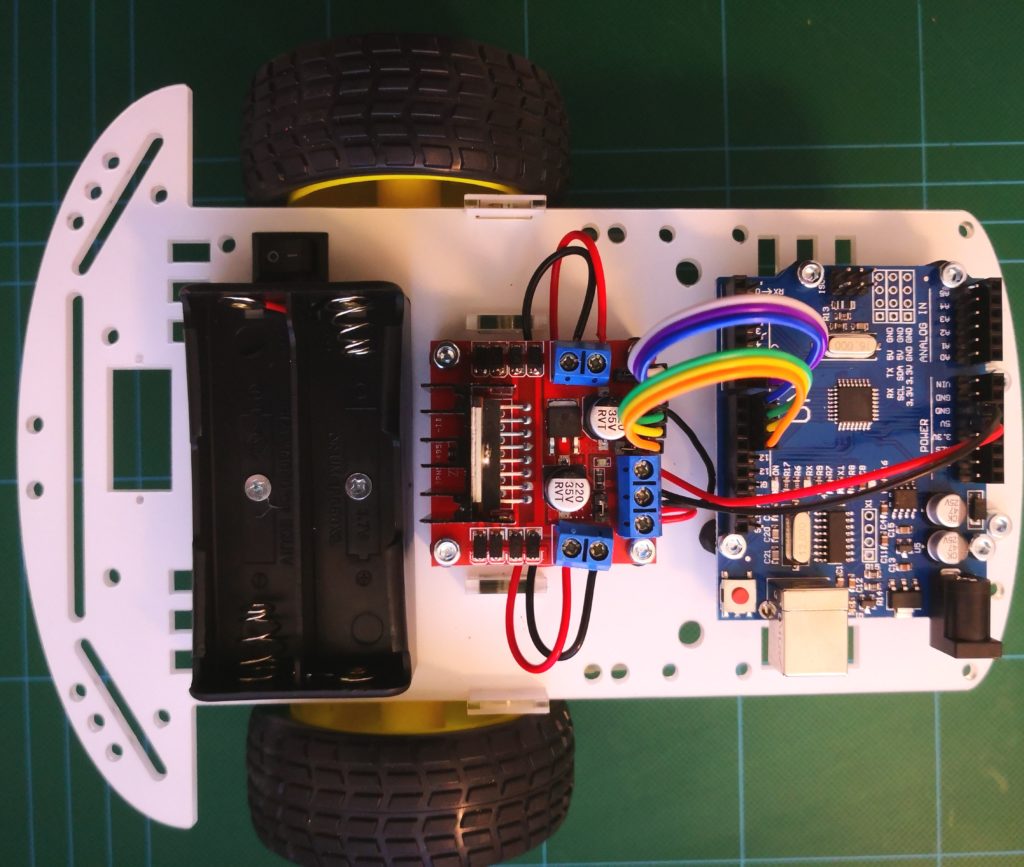
 Montaggio Elettronica
Montaggio Elettronica
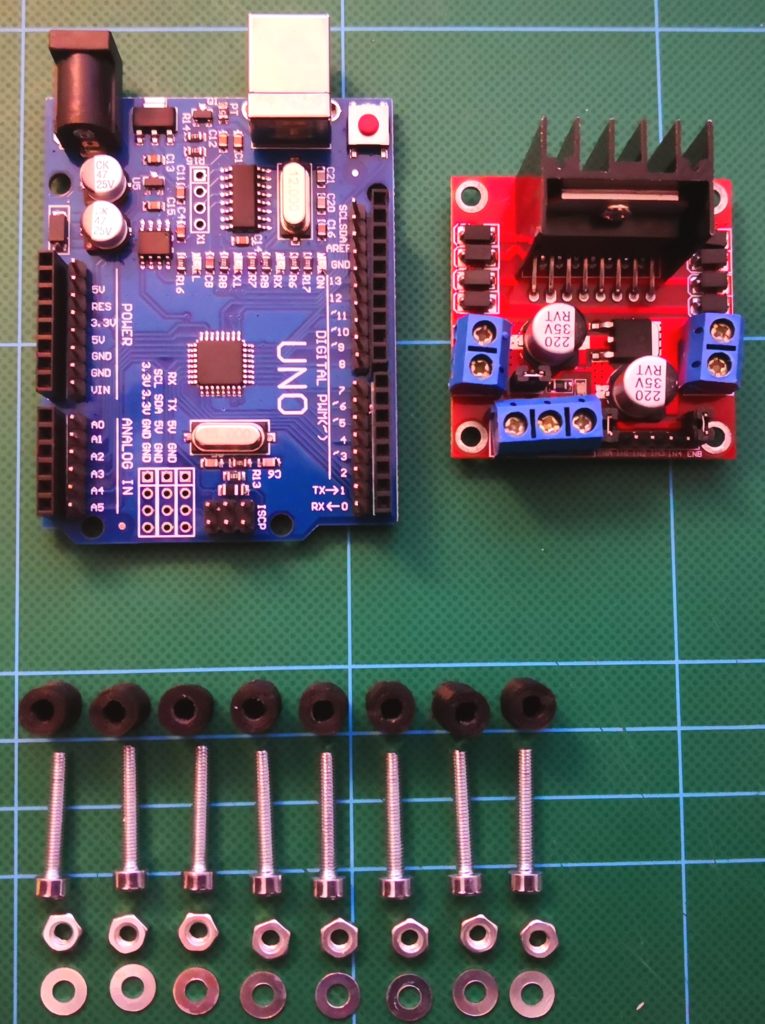 Occorreranno: 8 viti M3x16, 8 dadi, 8 rondelle, 8 spessori da 10 mm.
Occorreranno: 8 viti M3x16, 8 dadi, 8 rondelle, 8 spessori da 10 mm.
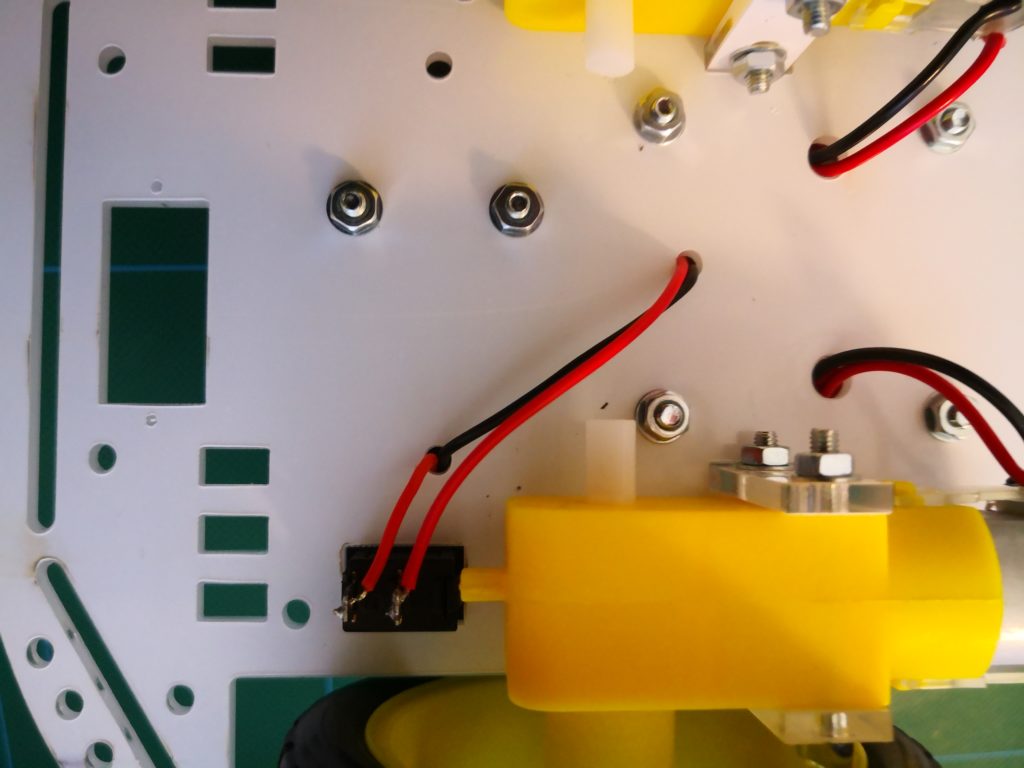
 Montaggio Porta-batterie ed interruttore
Montaggio Porta-batterie ed interruttore
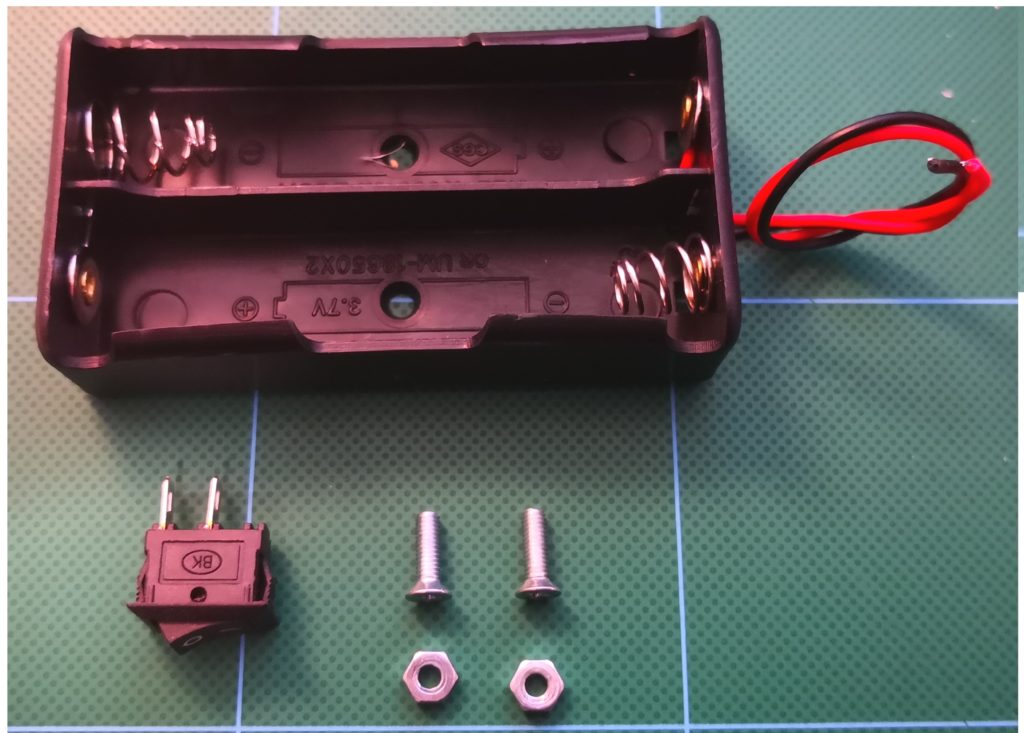 Occorreranno: 2 viti M3x10 svasate e 2 dadi.
Occorreranno: 2 viti M3x10 svasate e 2 dadi.
 Quando si inserisce l’interruttore far attenzione al verso come da foto.
Quando si inserisce l’interruttore far attenzione al verso come da foto.
 Cablaggio
Cablaggio
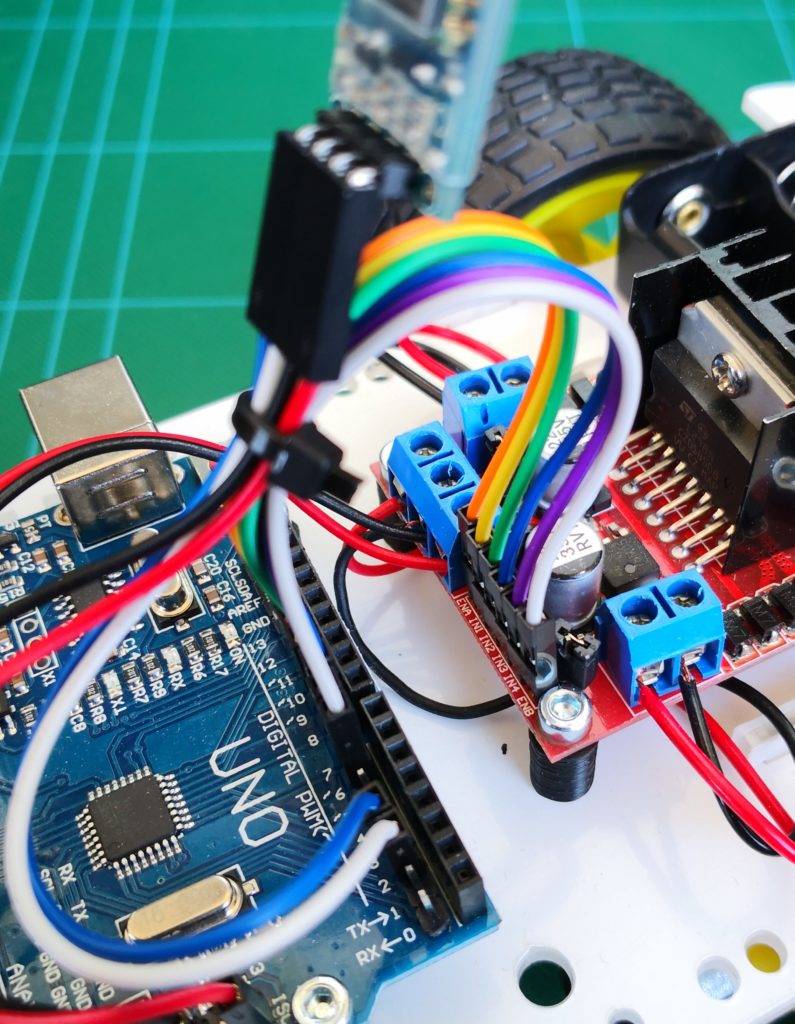
Questo è un esempio di collegamento
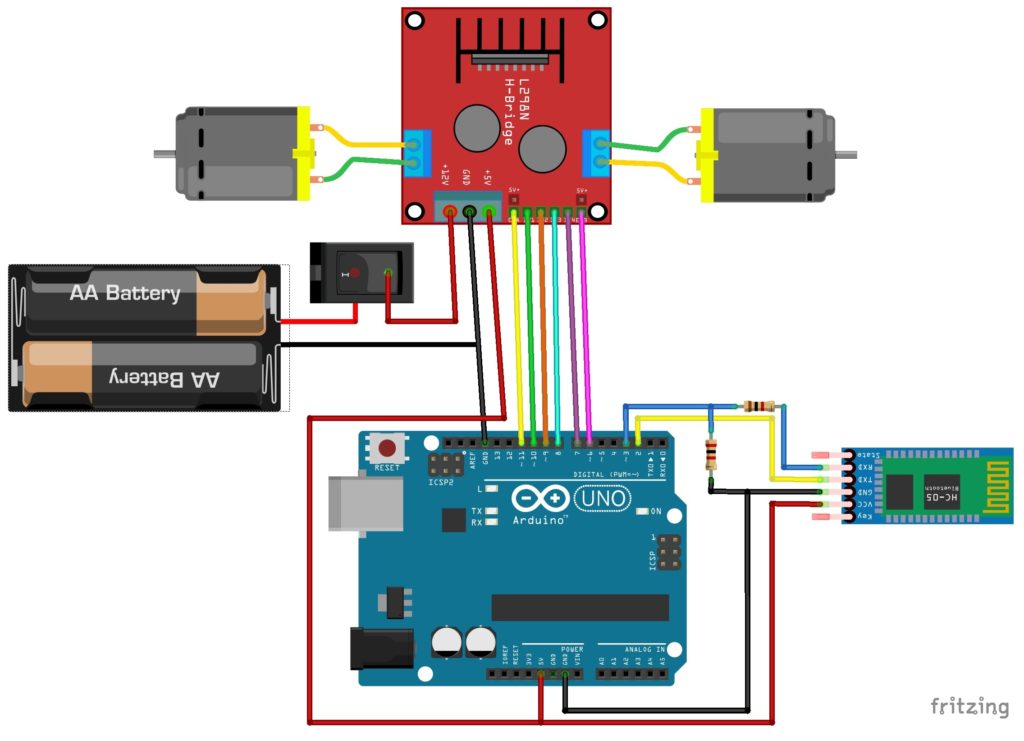 Si utilizzeranno dei cavi Dupont femmina femmina da 10 cm.
Si utilizzeranno dei cavi Dupont femmina femmina da 10 cm.
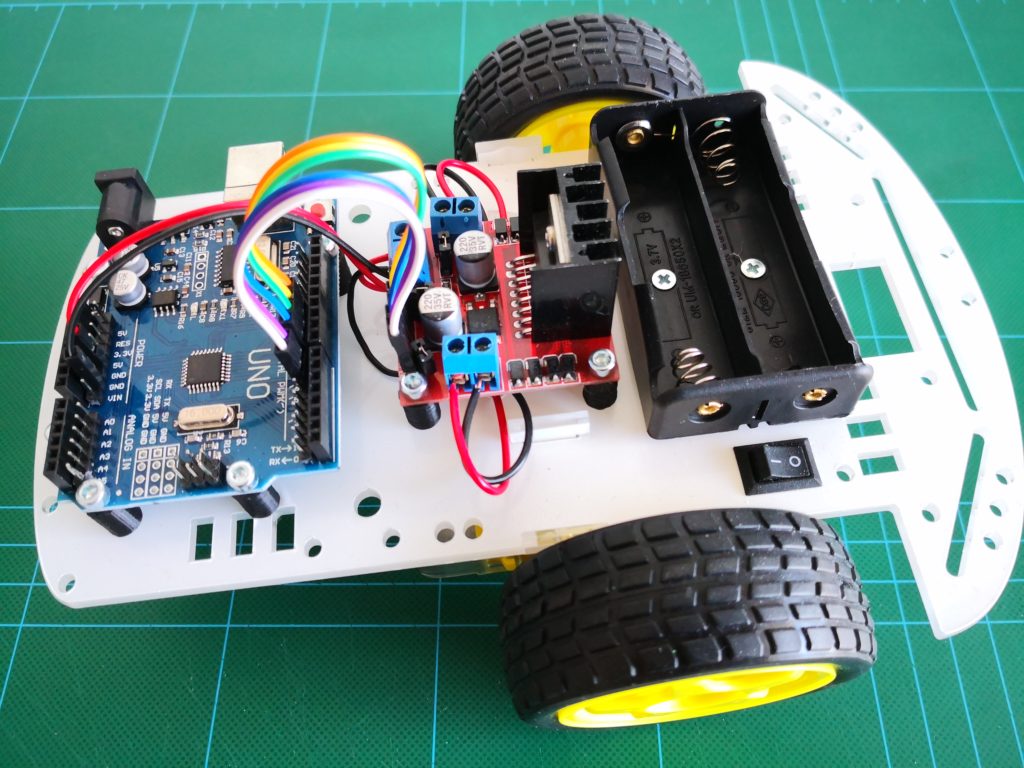
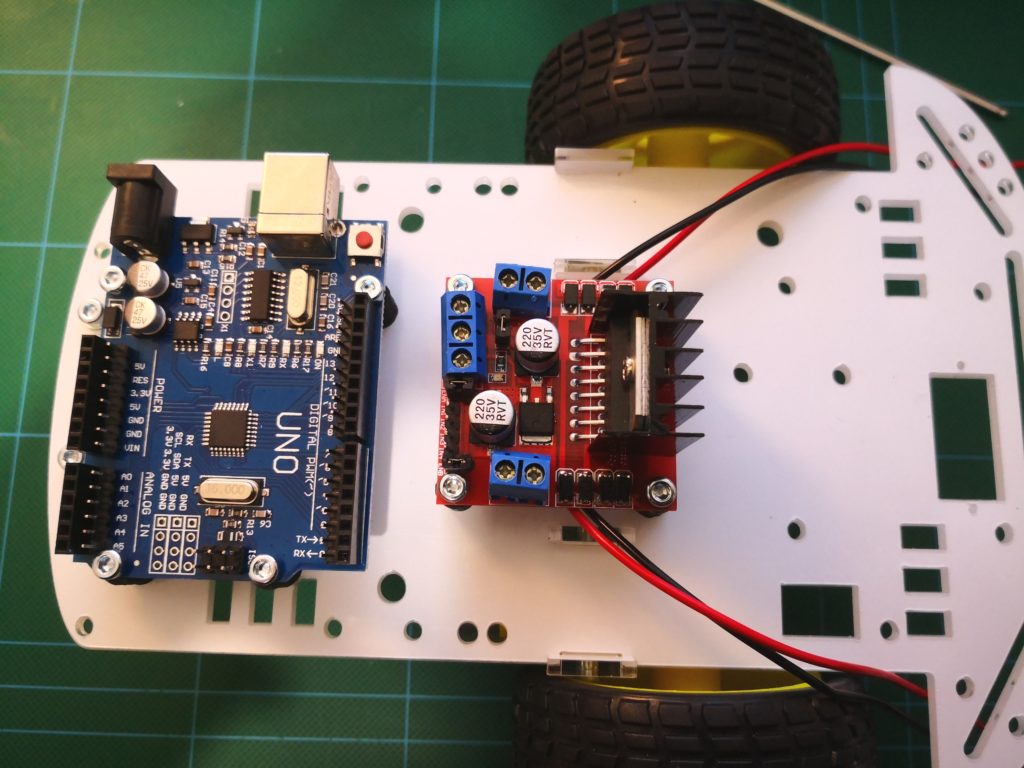
 Sotto è il risultato, dopo aver connesso anche i motori.
Sotto è il risultato, dopo aver connesso anche i motori.
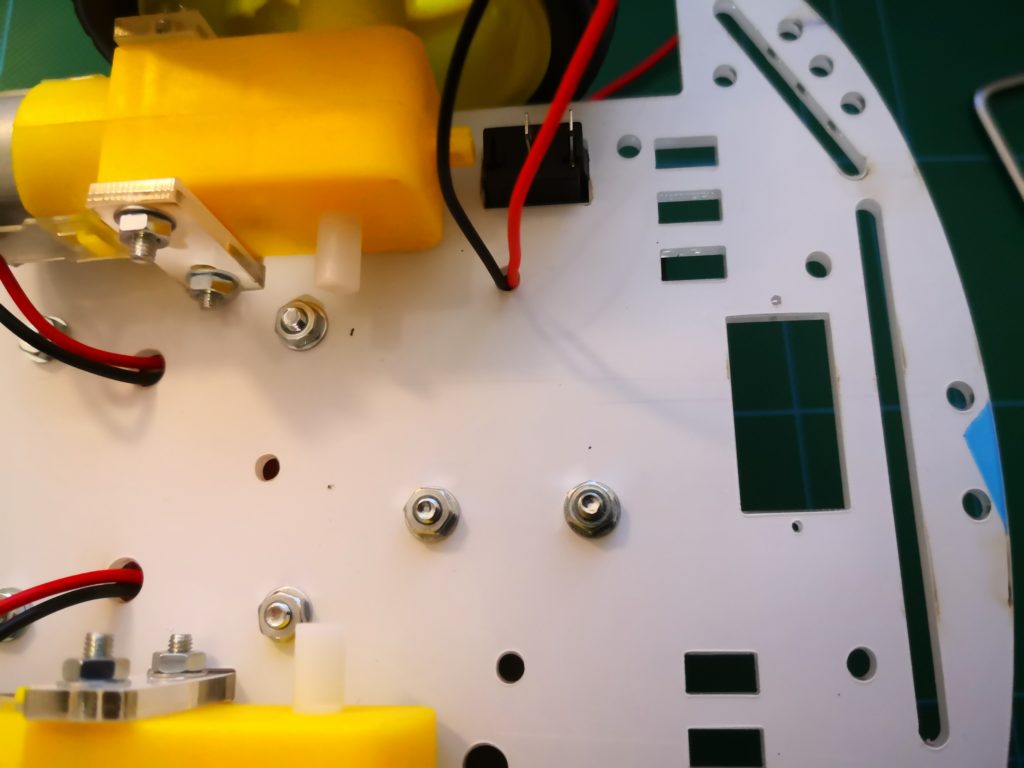
 Qui si vedono le connessioni del porta-batterie e l’interruttore.
Qui si vedono le connessioni del porta-batterie e l’interruttore.
 Il cavo negativo del porta-batteire andrà direttamente GND della scheda LM298, il positivo andrà fatto passare prima dall’interruttore per poi andarà al Vin della scheda LM298.
Il cavo negativo del porta-batteire andrà direttamente GND della scheda LM298, il positivo andrà fatto passare prima dall’interruttore per poi andarà al Vin della scheda LM298.
 Il Modulo Bluetooth
Il Modulo Bluetooth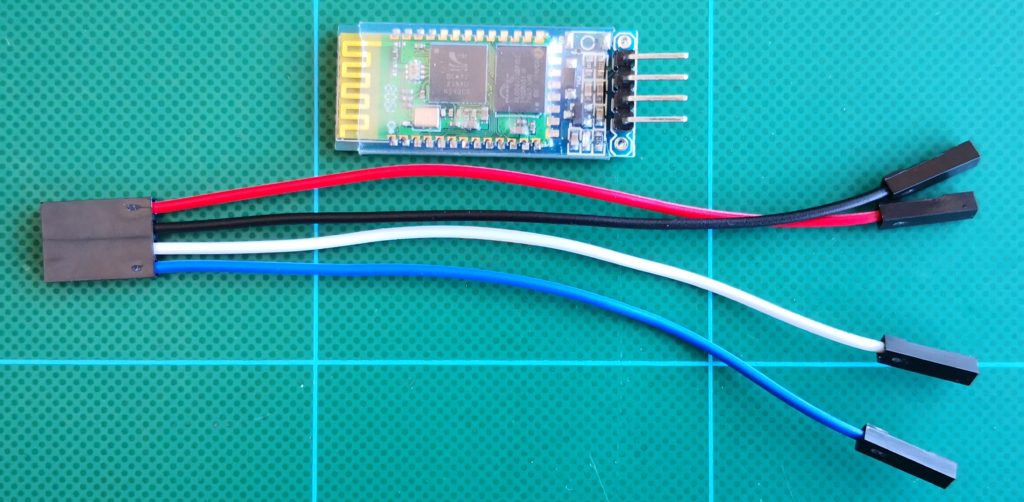 Per collegare VCC e GND del modulo si possono usare quelli del connettore ICSP di Arduino
Per collegare VCC e GND del modulo si possono usare quelli del connettore ICSP di Arduino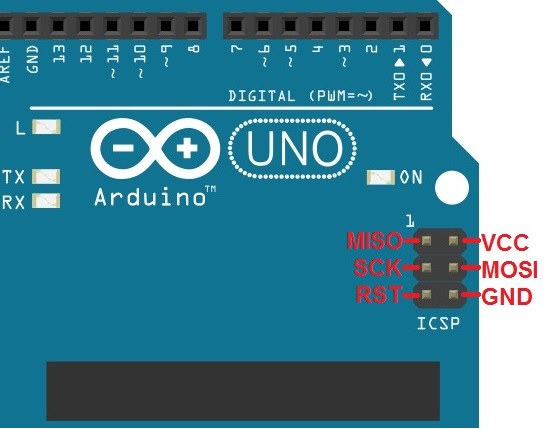
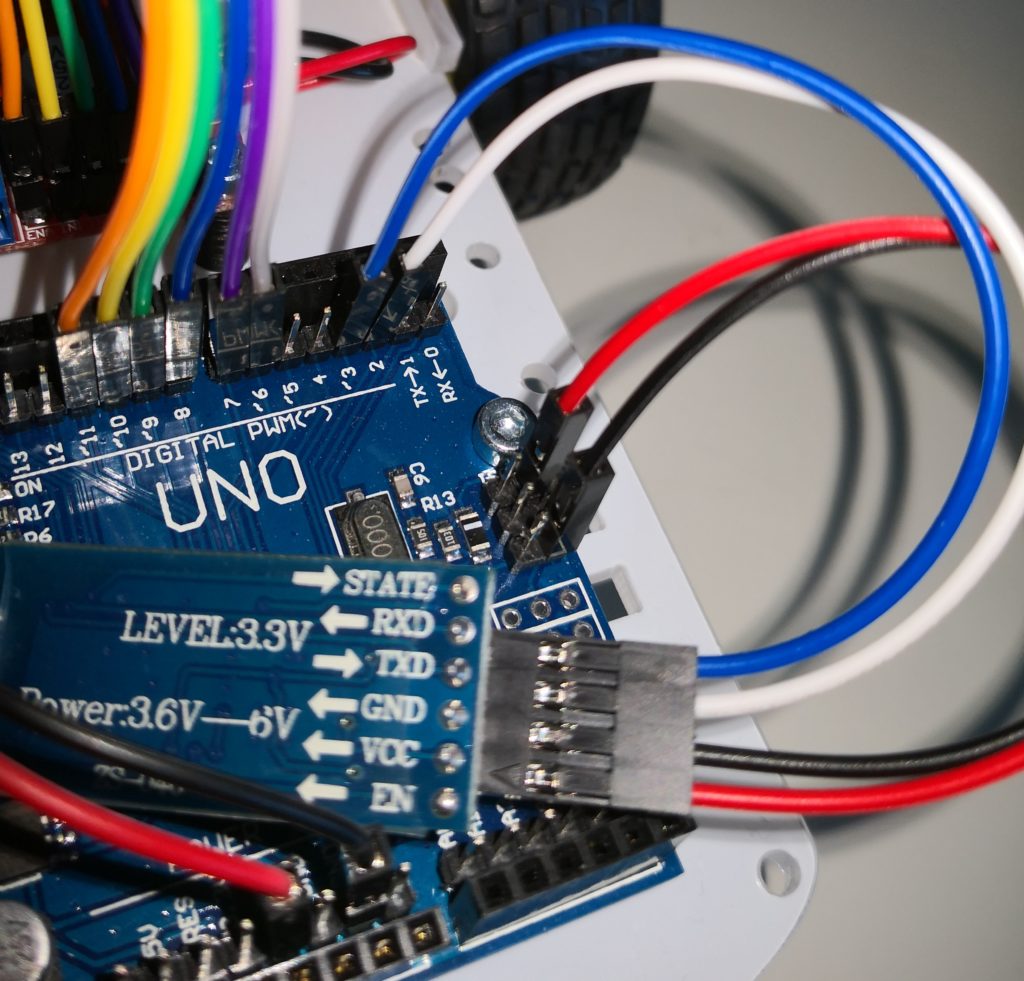 Per tenere fermo il modulo Bluetooth si pio’ utilizzare una fascetta di plastica
Per tenere fermo il modulo Bluetooth si pio’ utilizzare una fascetta di plastica
Come APP per Android vi consigliamo di usare la nostra “Makerslab 1 Robot Control” scaricabile da qui
 Uno Sketc di esempio da usare è il seguente:
Uno Sketc di esempio da usare è il seguente:
#include <SoftwareSerial.h> //Connessioni al LM298 #define ENA 11 #define IN1 10 #define IN2 9 #define IN3 8 #define IN4 7 #define ENB 6 // Connessioni al Bluetooth su seriale virtuale #define BT_TX_PIN 3 #define BT_RX_PIN 2 int velocita = 100; // velocità predefinita char data; SoftwareSerial bt = SoftwareSerial(BT_RX_PIN, BT_TX_PIN); void Avanti () { digitalWrite(IN1, 1); digitalWrite(IN2, 0); digitalWrite(IN3, 0); digitalWrite(IN4, 1); analogWrite(ENA, velocita); // Attiva il motore A analogWrite(ENB, velocita); // Attiva il motore B } void Indietro () { digitalWrite(IN1, 0); digitalWrite(IN2, 1); digitalWrite(IN3, 1); digitalWrite(IN4, 0); analogWrite(ENA, velocita); // Attiva il motore A analogWrite(ENB, velocita); // Attiva il motore B } void Sinistra () { digitalWrite(IN1, 1); digitalWrite(IN2, 0); digitalWrite(IN3, 1); digitalWrite(IN4, 0); analogWrite(ENA, velocita); analogWrite(ENB, velocita); } void Destra () { digitalWrite(IN1, 0); digitalWrite(IN2, 1); digitalWrite(IN3, 0); digitalWrite(IN4, 1); analogWrite(ENA, velocita); analogWrite(ENB, velocita); } void avantiDestra () { digitalWrite(IN1, 1); digitalWrite(IN2, 0); digitalWrite(IN3, 0); digitalWrite(IN4, 1); analogWrite(ENA, 0); analogWrite(ENB, velocita); } void avantiSinistra () { digitalWrite(IN1, 1); digitalWrite(IN2, 0); digitalWrite(IN3, 0); digitalWrite(IN4, 1); analogWrite(ENA, velocita); analogWrite(ENB, 0); } void indietroDestra () { digitalWrite(IN1, 0); digitalWrite(IN2, 1); digitalWrite(IN3, 1); digitalWrite(IN4, 0); analogWrite(ENA, 0); analogWrite(ENB, velocita); } void indietroSinistra () { digitalWrite(IN1, 0); digitalWrite(IN2, 1); digitalWrite(IN3, 1); digitalWrite(IN4, 0); analogWrite(ENA, velocita); analogWrite(ENB, 0); } void setup() { pinMode(BT_RX_PIN, INPUT); pinMode(BT_TX_PIN, OUTPUT); bt.begin(9600); bt.flush(); pinMode(ENA, OUTPUT); pinMode(ENB, OUTPUT); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); analogWrite(ENA, 0); // blocca il motore A analogWrite(ENB, 0); // blocca il motore B } void loop() { if (bt.available() > 0) { data = bt.read(); delay(3); } switch (data) { case 'M': analogWrite(ENA, 0); // blocca il motore A analogWrite(ENB, 0); // blocca il motore B break; case 'U': Avanti(); break; case 'D': Indietro(); break; case 'L': Sinistra(); break; case 'R': Destra(); break; case 'F': avantiDestra(); break; case 'E': indietroDestra(); break; case 'A': avantiSinistra(); break; case 'C': indietroSinistra(); break; case '0': velocita = 100; break; case '1': velocita = 135; break; case '2': velocita = 150; break; case '3': velocita = 165; break; case '4': velocita = 180; break; case '5': velocita = 195; break; case '6': velocita = 210; break; case '7': velocita = 225; break; case '8': velocita = 240; break; case '9': velocita = 255; break; } bt.flush(); }